Question Number 2526 by Filup last updated on 22/Nov/15
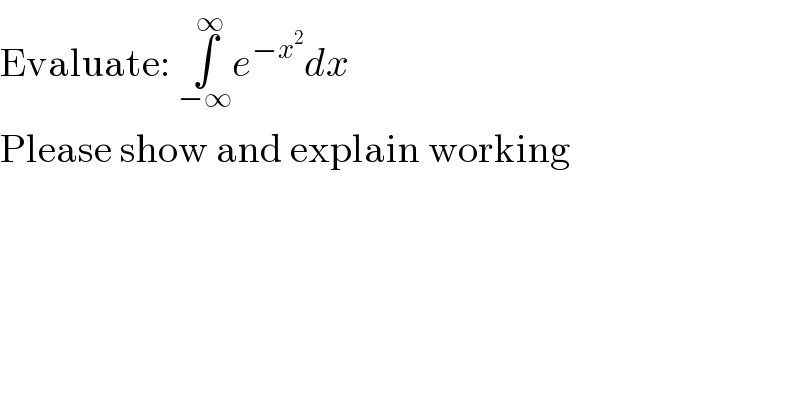
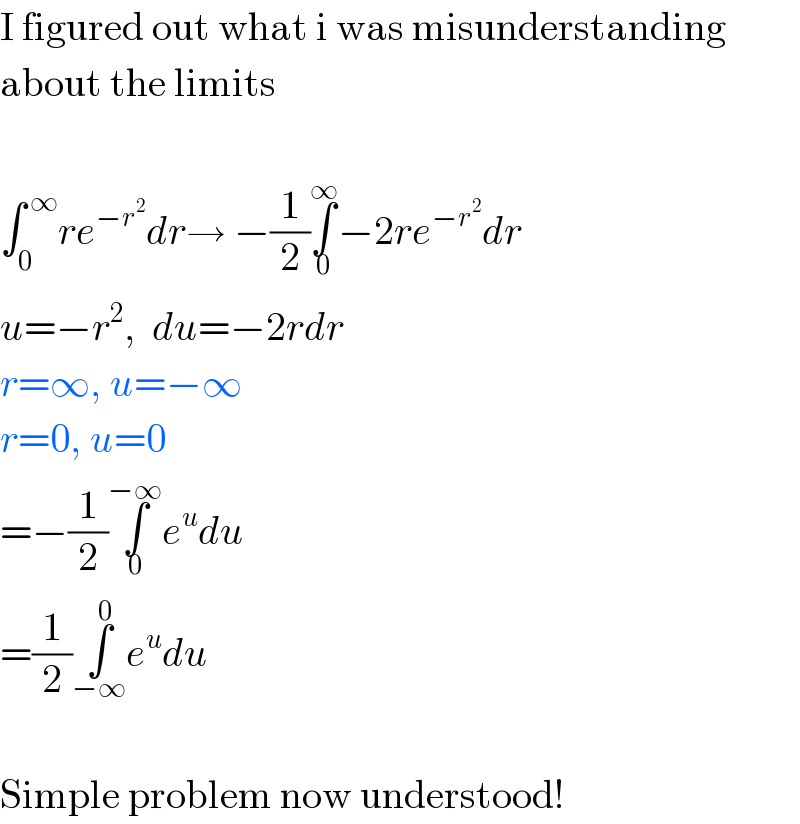
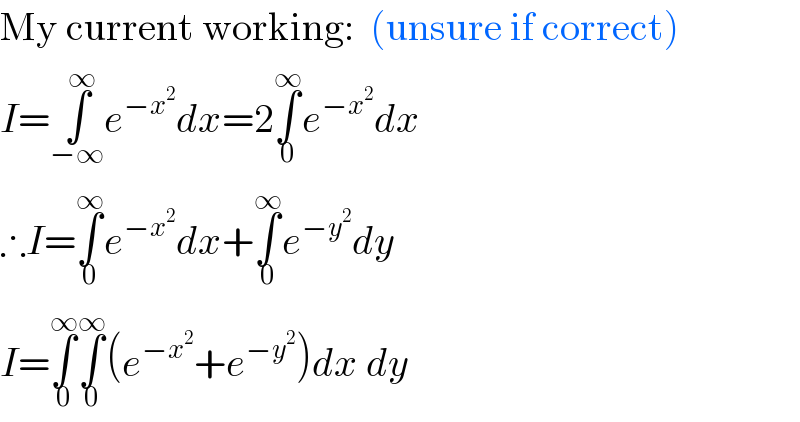
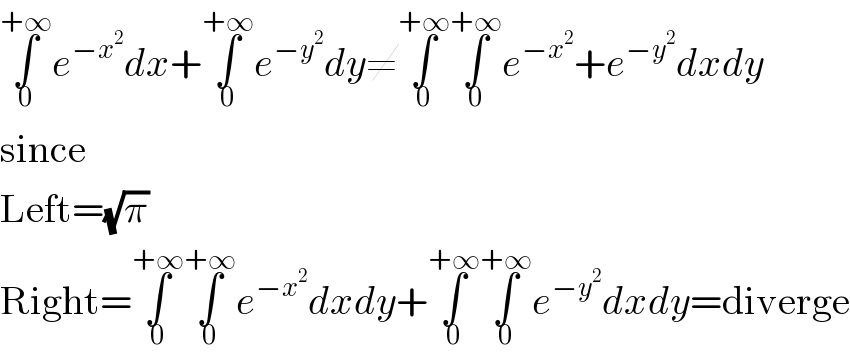
Commented by Filup last updated on 22/Nov/15
Commented by 123456 last updated on 22/Nov/15
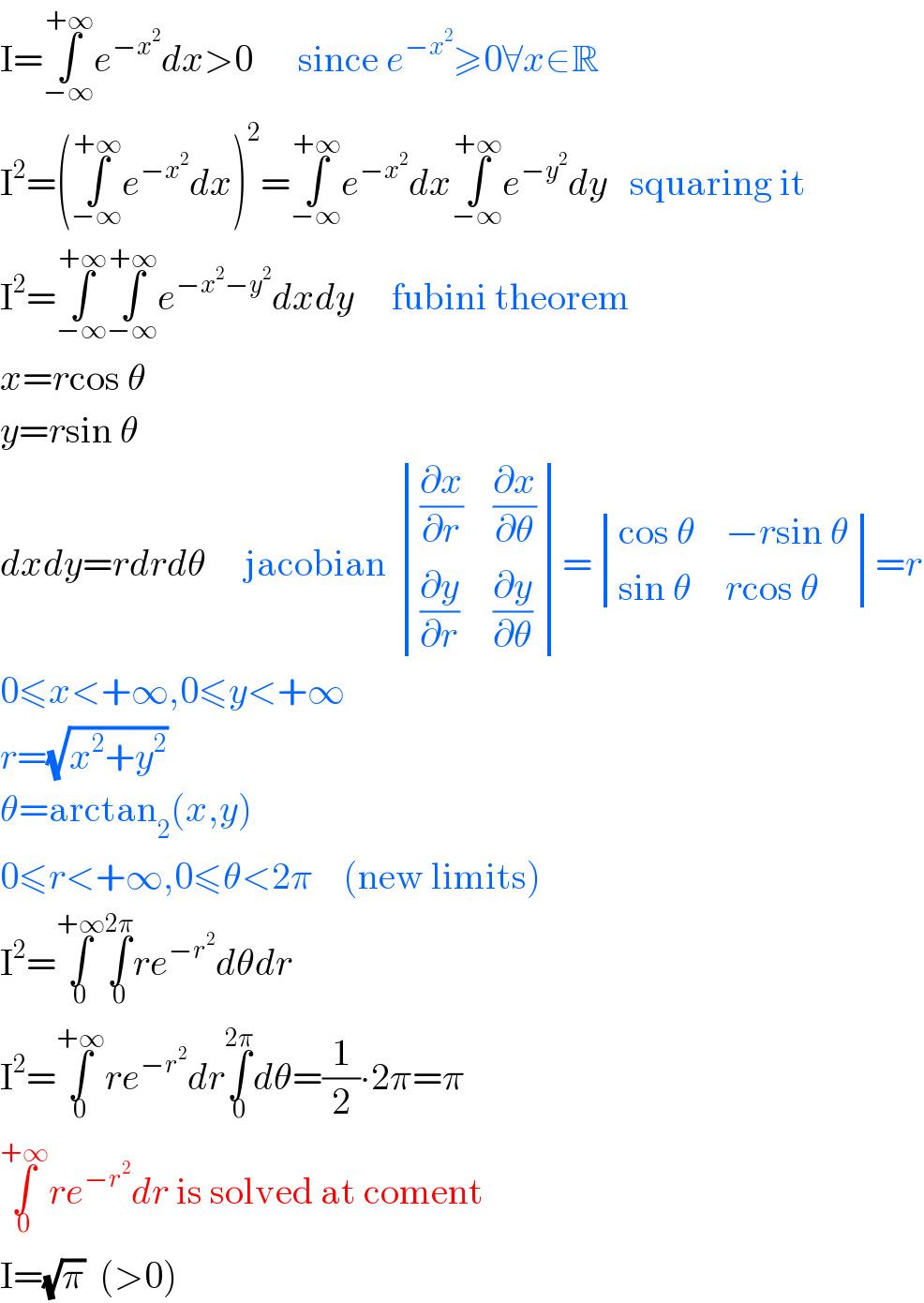
Answered by 123456 last updated on 22/Nov/15
Commented by Filup last updated on 22/Nov/15
Commented by Filup last updated on 22/Nov/15
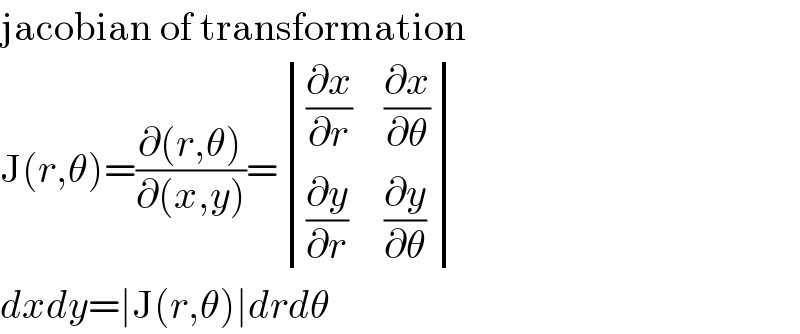
Commented by 123456 last updated on 22/Nov/15
Commented by Filup last updated on 22/Nov/15
Commented by 123456 last updated on 22/Nov/15
Commented by Filup last updated on 22/Nov/15
Commented by Filup last updated on 22/Nov/15
Commented by 123456 last updated on 22/Nov/15
Commented by 123456 last updated on 22/Nov/15
Commented by Filup last updated on 22/Nov/15
Commented by Filup last updated on 22/Nov/15