
Question Number 6820 by Tawakalitu. last updated on 29/Jul/16
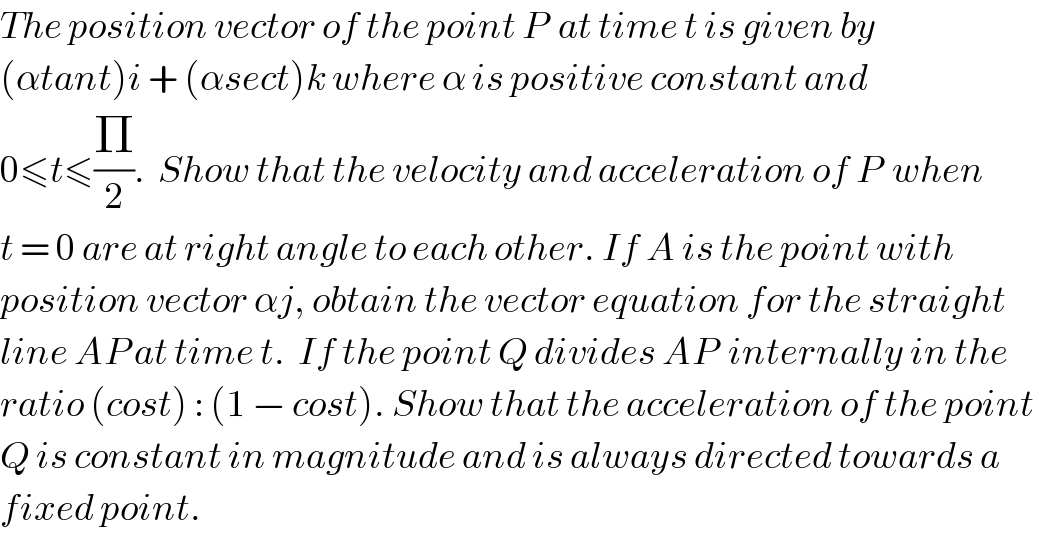
$${The}\:{position}\:{vector}\:{of}\:{the}\:{point}\:{P}\:\:{at}\:{time}\:{t}\:{is}\:{given}\:{by}\: \\ $$$$\left(\alpha{tant}\right){i}\:+\:\left(\alpha{sect}\right){k}\:{where}\:\alpha\:{is}\:{positive}\:{constant}\:{and} \\ $$$$\mathrm{0}\leqslant{t}\leqslant\frac{\Pi}{\mathrm{2}}.\:\:{Show}\:{that}\:{the}\:{velocity}\:{and}\:{acceleration}\:{of}\:{P}\:\:{when} \\ $$$${t}\:=\:\mathrm{0}\:{are}\:{at}\:{right}\:{angle}\:{to}\:{each}\:{other}.\:{If}\:{A}\:{is}\:{the}\:{point}\:{with}\: \\ $$$${position}\:{vector}\:\alpha{j},\:{obtain}\:{the}\:{vector}\:{equation}\:{for}\:{the}\:{straight}\: \\ $$$${line}\:{AP}\:{at}\:{time}\:{t}.\:\:{If}\:{the}\:{point}\:{Q}\:{divides}\:{AP}\:\:{internally}\:{in}\:{the} \\ $$$${ratio}\:\left({cost}\right)\::\:\left(\mathrm{1}\:−\:{cost}\right).\:{Show}\:{that}\:{the}\:{acceleration}\:{of}\:{the}\:{point} \\ $$$${Q}\:{is}\:{constant}\:{in}\:{magnitude}\:{and}\:{is}\:{always}\:{directed}\:{towards}\:{a}\: \\ $$$${fixed}\:{point}. \\ $$
Commented by Yozzii last updated on 29/Jul/16
![p(t)= (((αtant)),(0),((αsect)) ) α=constant>0, t∈[0,(π/2)] ⇒(dp/dt)(t)=v_p (t)= (((αsec^2 t)),(0),((αsect×tant)) ) ⇒(d^2 p/dt^2 )(t)=a_p (t)= (((2αsec^2 t×tant)),(0),((α(sect×tant×tant+sec^3 t))) ) a_p (t)= (((2αtantsec^2 t)),(0),((α(tan^2 t+sec^2 t)sect)) ) v_p (0)= ((α),(0),(0) ) , a_p (0)= ((0),(0),(α) ) ∴ v_p (0)•a_p (0)=α×0+0×0+0×α=0 Since v_p (0)•a_p (0)=0, the velocity and acceleration are perpendicular to each other at t=0. a(t)= ((0),(α),(0) ) Direction vector of line AP is parallel to b(t)=p(t)−a(t)= (((αtant)),((−α)),((αsect)) )=α (((tant)),((−1)),((sect)) ) So, the vector equation of the line AP is r= ((0),(α),(0) ) +μ (((tant)),((−1)),((sect)) ) (μ∈R). For Q dividing AP in the ratio (cost):(1−cost), μ=cost (OQ=OA+cost(AP)) ∴ q(t)= ((0),(α),(0) ) +cost (((tant)),((−1)),((sect)) ) q(t)= (((sint)),((α−cost)),(1) ) v_q (t)=((dq(t))/dt)= (((cost)),((sint)),(0) ) a_q (t)=((dv_q (t))/dt)= (((−sint)),((cost)),(0) ) ⇒∣a_q (t)∣=(√((−sint)^2 +(cost)^2 +0^2 ))=1 Since ∣a_q (t)∣=1 for all t∈[0,(π/2)], the acceleration of the point Q is constant in magnitude. Since the acceleration of Q has no component parallel to the unit vector k, but variable components parallel to i and j, a_q (t) acts entirely in the plane containing both the vectors i and j. Observe that v_q (t)•a_q (t)=0 ⇒velocity and accleration of Q are normal to each other.](https://www.tinkutara.com/question/Q6822.png)
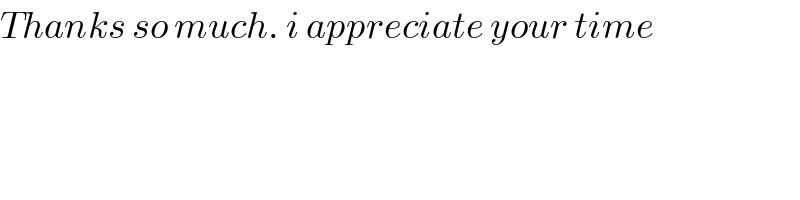
$$\boldsymbol{{p}}\left({t}\right)=\begin{pmatrix}{\alpha{tant}}\\{\mathrm{0}}\\{\alpha{sect}}\end{pmatrix}\:\:\:\:\alpha={constant}>\mathrm{0},\:{t}\in\left[\mathrm{0},\frac{\pi}{\mathrm{2}}\right] \\ $$$$\Rightarrow\frac{{d}\boldsymbol{{p}}}{{dt}}\left({t}\right)=\boldsymbol{{v}}_{{p}} \left({t}\right)=\begin{pmatrix}{\alpha{sec}^{\mathrm{2}} {t}}\\{\mathrm{0}}\\{\alpha{sect}×{tant}}\end{pmatrix} \\ $$$$\Rightarrow\frac{{d}^{\mathrm{2}} \boldsymbol{{p}}}{{dt}^{\mathrm{2}} }\left({t}\right)=\boldsymbol{{a}}_{{p}} \left({t}\right)=\begin{pmatrix}{\mathrm{2}\alpha{sec}^{\mathrm{2}} {t}×{tant}}\\{\mathrm{0}}\\{\alpha\left({sect}×{tant}×{tant}+{sec}^{\mathrm{3}} {t}\right)}\end{pmatrix} \\ $$$$\boldsymbol{{a}}_{{p}} \left({t}\right)=\begin{pmatrix}{\mathrm{2}\alpha{tantsec}^{\mathrm{2}} {t}}\\{\mathrm{0}}\\{\alpha\left({tan}^{\mathrm{2}} {t}+{sec}^{\mathrm{2}} {t}\right){sect}}\end{pmatrix} \\ $$$$\boldsymbol{{v}}_{{p}} \left(\mathrm{0}\right)=\begin{pmatrix}{\alpha}\\{\mathrm{0}}\\{\mathrm{0}}\end{pmatrix}\:,\:\boldsymbol{{a}}_{{p}} \left(\mathrm{0}\right)=\begin{pmatrix}{\mathrm{0}}\\{\mathrm{0}}\\{\alpha}\end{pmatrix} \\ $$$$\therefore\:\boldsymbol{{v}}_{{p}} \left(\mathrm{0}\right)\bullet\boldsymbol{{a}}_{{p}} \left(\mathrm{0}\right)=\alpha×\mathrm{0}+\mathrm{0}×\mathrm{0}+\mathrm{0}×\alpha=\mathrm{0} \\ $$$${Since}\:\boldsymbol{{v}}_{{p}} \left(\mathrm{0}\right)\bullet\boldsymbol{{a}}_{{p}} \left(\mathrm{0}\right)=\mathrm{0},\:{the}\:{velocity} \\ $$$${and}\:{acceleration}\:{are}\:{perpendicular} \\ $$$${to}\:{each}\:{other}\:{at}\:{t}=\mathrm{0}. \\ $$$$\boldsymbol{{a}}\left({t}\right)=\begin{pmatrix}{\mathrm{0}}\\{\alpha}\\{\mathrm{0}}\end{pmatrix} \\ $$$${Direction}\:{vector}\:{of}\:{line}\:{AP}\:{is}\:{parallel}\:{to} \\ $$$$\boldsymbol{{b}}\left({t}\right)=\boldsymbol{{p}}\left({t}\right)−\boldsymbol{{a}}\left({t}\right)=\begin{pmatrix}{\alpha{tant}}\\{−\alpha}\\{\alpha{sect}}\end{pmatrix}=\alpha\begin{pmatrix}{{tant}}\\{−\mathrm{1}}\\{{sect}}\end{pmatrix} \\ $$$${So},\:{the}\:{vector}\:{equation}\:{of}\:{the}\:{line}\:{AP}\:{is} \\ $$$$\boldsymbol{{r}}=\begin{pmatrix}{\mathrm{0}}\\{\alpha}\\{\mathrm{0}}\end{pmatrix}\:+\mu\begin{pmatrix}{{tant}}\\{−\mathrm{1}}\\{{sect}}\end{pmatrix}\:\:\:\left(\mu\in\mathbb{R}\right). \\ $$$${For}\:{Q}\:{dividing}\:{AP}\:{in}\:{the}\:{ratio}\:\left({cost}\right):\left(\mathrm{1}−{cost}\right), \\ $$$$\mu={cost}\:\left({OQ}={OA}+{cost}\left({AP}\right)\right) \\ $$$$\therefore\:\boldsymbol{{q}}\left({t}\right)=\begin{pmatrix}{\mathrm{0}}\\{\alpha}\\{\mathrm{0}}\end{pmatrix}\:+{cost}\begin{pmatrix}{{tant}}\\{−\mathrm{1}}\\{{sect}}\end{pmatrix} \\ $$$$\boldsymbol{{q}}\left({t}\right)=\begin{pmatrix}{{sint}}\\{\alpha−{cost}}\\{\mathrm{1}}\end{pmatrix} \\ $$$$\boldsymbol{{v}}_{{q}} \left({t}\right)=\frac{{d}\boldsymbol{{q}}\left({t}\right)}{{dt}}=\begin{pmatrix}{{cost}}\\{{sint}}\\{\mathrm{0}}\end{pmatrix} \\ $$$$\boldsymbol{{a}}_{{q}} \left({t}\right)=\frac{{d}\boldsymbol{{v}}_{{q}} \left({t}\right)}{{dt}}=\begin{pmatrix}{−{sint}}\\{{cost}}\\{\mathrm{0}}\end{pmatrix} \\ $$$$\Rightarrow\mid\boldsymbol{{a}}_{{q}} \left({t}\right)\mid=\sqrt{\left(−{sint}\right)^{\mathrm{2}} +\left({cost}\right)^{\mathrm{2}} +\mathrm{0}^{\mathrm{2}} }=\mathrm{1} \\ $$$${Since}\:\mid\boldsymbol{{a}}_{{q}} \left({t}\right)\mid=\mathrm{1}\:{for}\:{all}\:{t}\in\left[\mathrm{0},\frac{\pi}{\mathrm{2}}\right],\:{the} \\ $$$${acceleration}\:{of}\:{the}\:{point}\:{Q}\:{is}\:{constant}\:{in} \\ $$$${magnitude}. \\ $$$${Since}\:{the}\:{acceleration}\:{of}\:{Q}\:{has} \\ $$$${no}\:{component}\:{parallel}\:{to}\:{the}\:{unit}\:{vector}\:\boldsymbol{{k}}, \\ $$$${but}\:{variable}\:{components}\:{parallel}\:{to}\:\boldsymbol{{i}}\:{and}\:\boldsymbol{{j}}, \\ $$$$\boldsymbol{{a}}_{{q}} \left({t}\right)\:{acts}\:{entirely}\:{in}\:{the}\:{plane}\:{containing} \\ $$$${both}\:{the}\:{vectors}\:\boldsymbol{{i}}\:{and}\:\boldsymbol{{j}}.\: \\ $$$${Observe}\:{that}\:\boldsymbol{{v}}_{{q}} \left({t}\right)\bullet\boldsymbol{{a}}_{{q}} \left({t}\right)=\mathrm{0} \\ $$$$\Rightarrow{velocity}\:{and}\:{accleration}\:{of}\:{Q} \\ $$$${are}\:{normal}\:{to}\:{each}\:{other}. \\ $$$$ \\ $$
Commented by Tawakalitu. last updated on 30/Jul/16
$${Thanks}\:{so}\:{much}.\:{i}\:{appreciate}\:{your}\:{time} \\ $$