1-find-eigen-values-and-corresponding-eigen-vector-of-the-matrix-A-cos-sin-sin-cos-2-solve-6y-2-dx-x-y-2x-2-dy-0- Tinku Tara June 4, 2023 None 0 Comments FacebookTweetPin Question Number 91321 by M±th+et+s last updated on 29/Apr/20 1)findeigenvaluesandcorrespondingeigenvectorofthematrixA=[cos(θ)−sin(θ)sin(θ)cos(θ)]2)solve6y2dx−x(y+2x2)dy=0 Commented by mathmax by abdo last updated on 30/Apr/20 1)P(x)=det(A−xI)=|cosθ−x−sinθsinθcosθ−x|=(cosθ−x)2+sin2θP(x)=0⇔(x−cosθ)2+sin2θ=0⇔(x−cosθ)2=(isinθ)2⇒x−cosθ=+−isinθ⇒x=cosθ+−isinθsothevaluesareλ1=eiθandλ2=e−iθV(λ1)=Ker(A−λ1I)={u/(A−λ1I)u=0}u(xy)(A−λ1)u=0⇒(cosθ−eiθ−sinθsinθcosθ−eiθ)(xy)=0⇒(−isinθ−sinθsinθ−isinθ)(xy)=0⇒{−isinθx−sinθy=0sinθx−isinθy=0⇒{isinθx+sinθy=0sinθx−isinθy=0⇒sinθx=isinθyifsinθ≠0⇒x=iy⇒(x,y)=(iy,y)=ye1withe1(i1)V(λ2)=Ker(A−λ2I)={u/(A−λ2I)u=0}(A−λ2I)u=0⇒(cosθ−e−iθ−sinθsinθcosθ−e−iθ)(xy)=0⇒(isinθ−sinθsinθisinθ)(xy)=0⇒{isinθx−sinθy=0sinθx+isinθy=0⇒sinθx=−isinθysoifsinθ≠0wegetx=−iy⇒(x,y)=(−iy,y)=ye2withe2(−i1)WeseeV(λ1)=Δe1dim(V(λ1))=1V(λ2)=Δe2anddim(V(λ2))=1Aisdiagonalisable…. Commented by M±th+et+s last updated on 30/Apr/20 niceandcorrectworksirgodblessyou Commented by turbo msup by abdo last updated on 30/Apr/20 youarewelcome. Terms of Service Privacy Policy Contact: info@tinkutara.com FacebookTweetPin Post navigation Previous Previous post: If-r-is-a-unit-vector-then-show-that-r-dr-dt-dr-dt-Next Next post: 2-x-x-2-hence-x-2-prove- Leave a Reply Cancel replyYour email address will not be published. Required fields are marked *Comment * Name * Save my name, email, and website in this browser for the next time I comment.

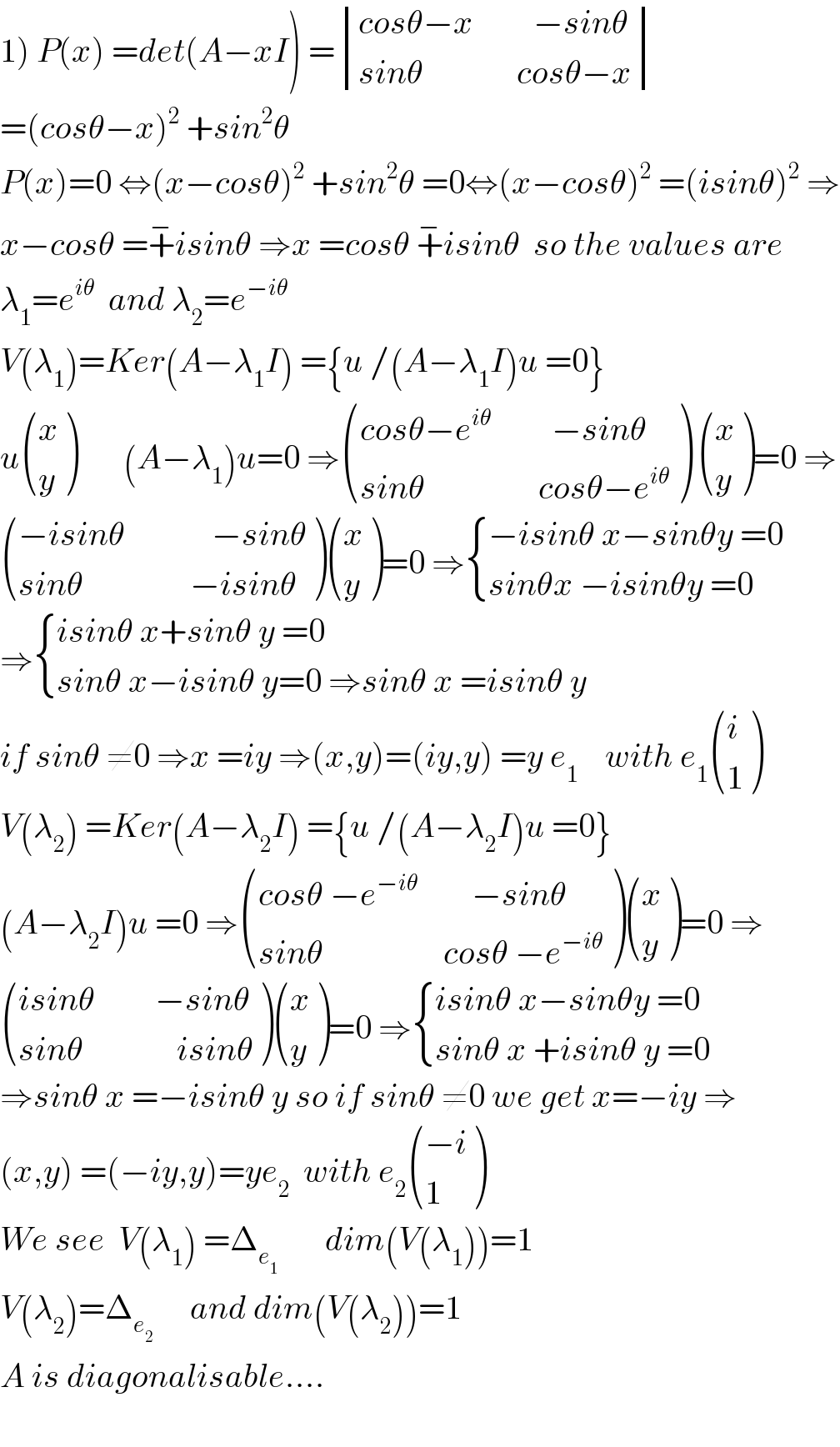
![1)find eigen values and corresponding eigen vector of the matrix A= [((cos(θ)),(−sin(θ))),((sin(θ)),( cos(θ))) ] 2)solve 6y^2 dx−x(y+2x^2 )dy=0](https://www.tinkutara.com/question/Q91321.png)