a-particle-of-mass-m-kg-is-moving-along-a-smooth-wire-that-is-fixed-in-a-plane-The-polar-equation-of-the-wire-is-r-ae-3-The-particle-moves-with-a-cons-tant-velocity-of-6-At-time-t-0-th Tinku Tara June 4, 2023 Others 0 Comments FacebookTweetPin Question Number 58171 by pierre last updated on 19/Apr/19 aparticleofmassmkgismovingalongasmoothwirethatisfixedinaplane.Thepolarequationofthewireisr=ae3θ.Theparticlemoveswithaconstantvelocityof6.Attimet=0,theparticleisatthepointwithpolarequation(a,θ)a)Findthetransverseandradialcomponentsoftheaccelerationoftheparticleintermsofaandt.b)theresultantforceontheparticleisF.ShowthatthemagnitudeofFattimetis360mae18t Answered by tanmay last updated on 19/Apr/19 a)a→r=r..−r(θ..)2→radialaccelarationa→T=2r.θ.+rθ..→transversaccelarationnowr.=drdt=ddt(ae3θ)=a×e3θ×3=3ae3θ×dθdtr.=3ae3θ×θ.r..=ddt(r.)=ddt(3ae3θ×θ.)r..=3a[e3θ×θ..+e3θ×3×dθdt×θ.]r..=3ae3θθ..+9ae3θ(θ..)2→3rθ..+9r(θ..)2Extra \left or missing \rightExtra \left or missing \righta→r=3rθ..+9r(θ..)2−r(θ..)2→3rθ..+8r(θ..)2←radialaccelarationa→T=2r.θ.+rθ..a→T=2(3ae3θθ.)θ.+(ae3θ)θ..a→T=6ae3θθ.+ae3θθ..a→T=6rθ.+rθ..→transverseaccplscheck… Terms of Service Privacy Policy Contact: info@tinkutara.com FacebookTweetPin Post navigation Previous Previous post: Question-189242Next Next post: If-h-x-f-2-x-g-2-x-f-x-g-x-and-g-x-f-x-then-h-x-a-0-b-1-c-4-f-x-g-x-d- Leave a Reply Cancel replyYour email address will not be published. Required fields are marked *Comment * Name * Save my name, email, and website in this browser for the next time I comment.

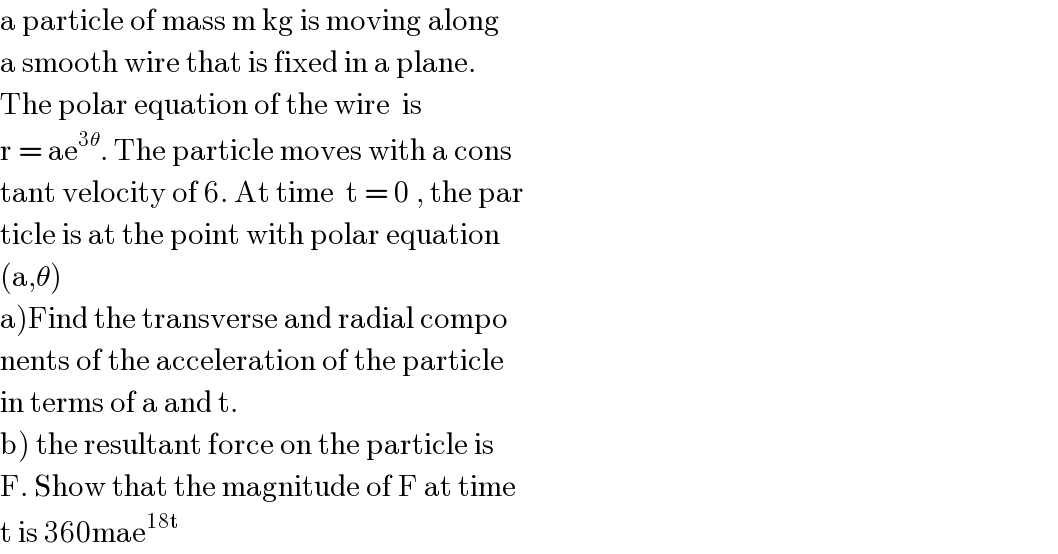
![a)a_r ^→ =r^(..) −r(θ^(..) )^2 →radial accelaration a_T ^→ =2r^. θ^. +rθ^(..) →transvers accelaration now r^. =(dr/dt)=(d/dt)(ae^(3θ) )=a×e^(3θ) ×3=3ae^(3θ) ×(dθ/dt) r^. =3ae^(3θ) ×θ^. r^(..) =(d/dt)(r^. )=(d/dt)(3ae^(3θ) ×θ^. ) r^(..) =3a[e^(3θ) ×θ^(..) +e^(3θ) ×3×(dθ/dt)×θ^. ] r^(..) =3ae^(3θ) θ^(..) +9ae^(3θ) (θ^(..) )^2 →3rθ^(..) +9r(θ^(..) )^2 so a_r ^→ =r^(..) −r(^ θ^(..) )^2 a_r ^→ =3rθ^(..) +9r(θ^(..) )^2 −r(θ^(..) )^2 →3rθ^(..) +8r(θ^(..) )^2 ←radial accelaration a_T ^→ =2r^. θ^. +rθ^(..) a_T ^→ =2(3ae^(3θ) θ^. )θ^. +(ae^(3θ) )θ^(..) a_T ^→ =6ae^(3θ) θ^. +ae^(3θ) θ^(..) a_T ^→ =6rθ^. +r^ θ^(..) →transverse acc pls check...](https://www.tinkutara.com/question/Q58194.png)