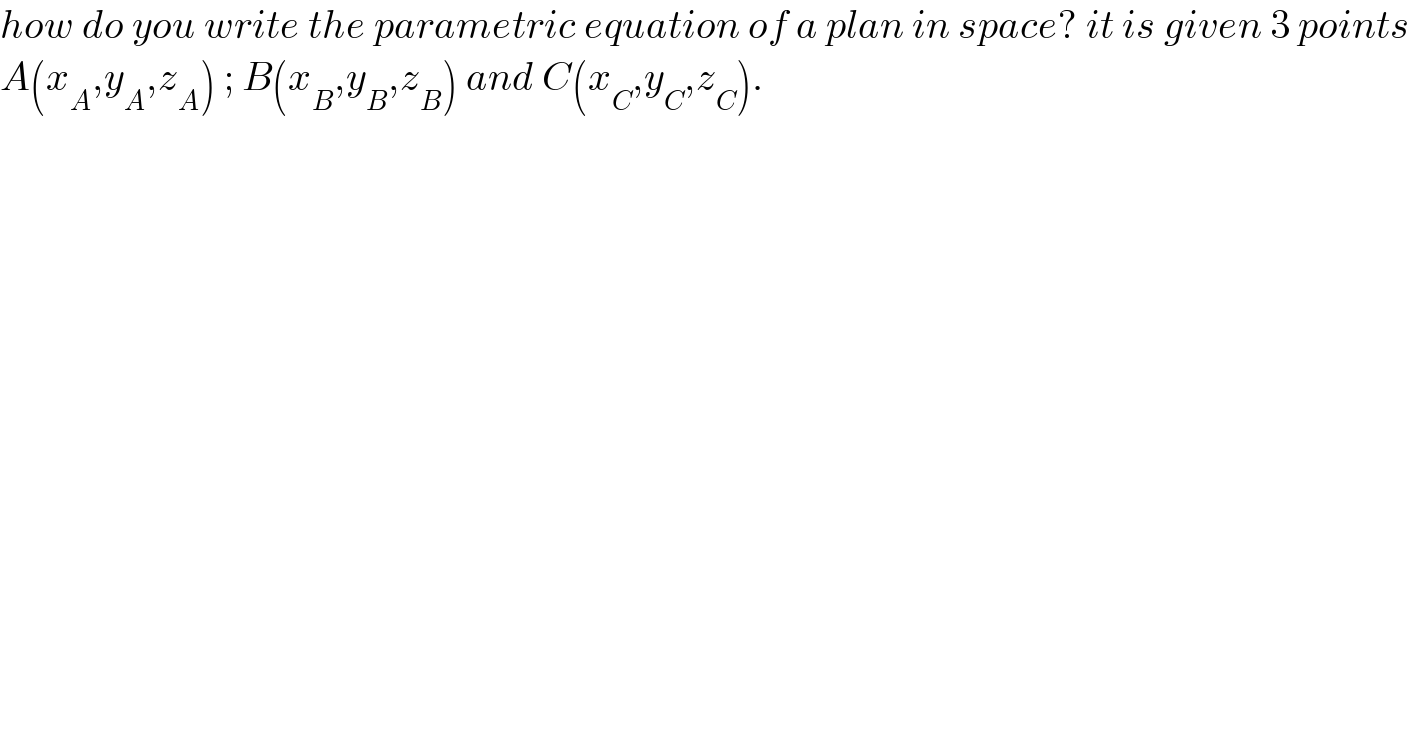
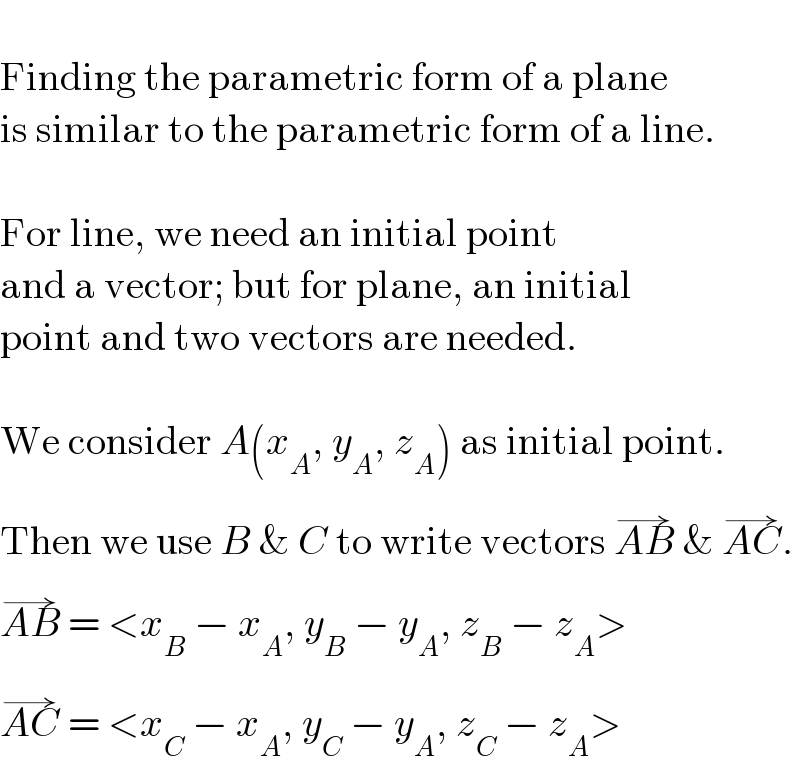
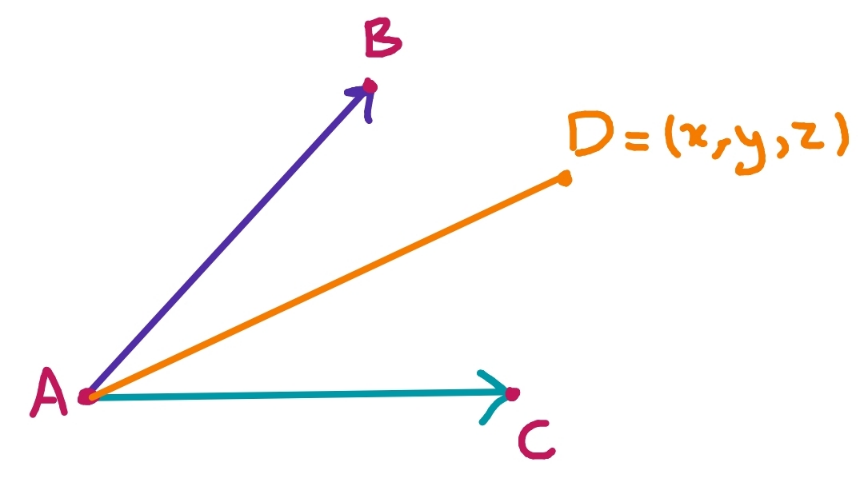
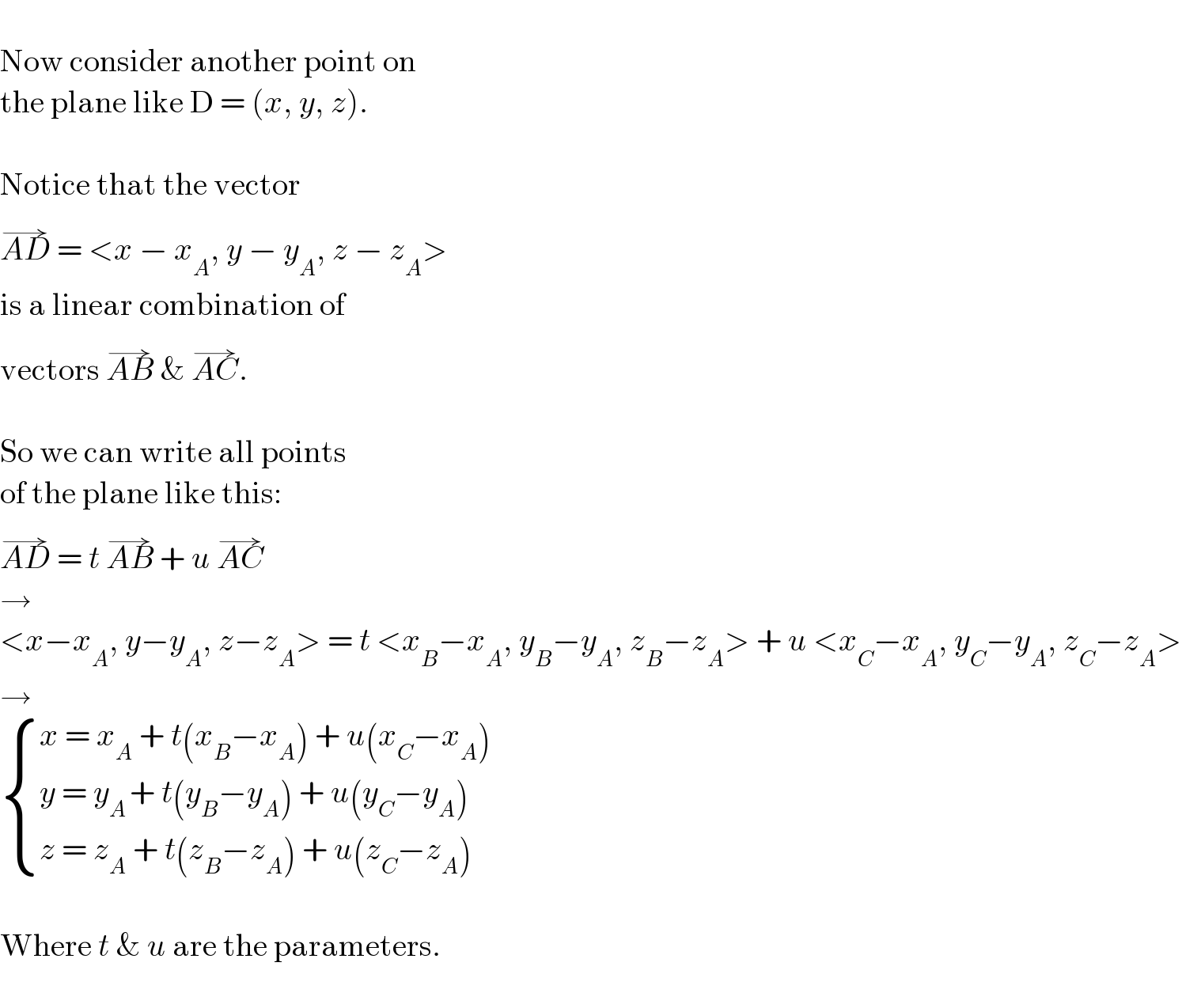
how-do-you-write-the-parametric-equation-of-a-plan-in-space-it-is-given-3-points-A-x-A-y-A-z-A-B-x-B-y-B-z-B-and-C-x-C-y-C-z-C- Tinku Tara June 4, 2023 None 0 Comments FacebookTweetPin Question Number 180062 by Matica last updated on 06/Nov/22 howdoyouwritetheparametricequationofaplaninspace?itisgiven3pointsA(xA,yA,zA);B(xB,yB,zB)andC(xC,yC,zC). Answered by hmr last updated on 07/Nov/22 Findingtheparametricformofaplaneissimilartotheparametricformofaline.Forline,weneedaninitialpointandavector;butforplane,aninitialpointandtwovectorsareneeded.WeconsiderA(xA,yA,zA)asinitialpoint.ThenweuseB&CtowritevectorsAB→&AC→.AB→=<xB−xA,yB−yA,zB−zA>AC→=<xC−xA,yC−yA,zC−zA> Commented by hmr last updated on 07/Nov/22 Commented by hmr last updated on 07/Nov/22 Commented by hmr last updated on 07/Nov/22 NowconsideranotherpointontheplanelikeD=(x,y,z).NoticethatthevectorAD→=<x−xA,y−yA,z−zA>isalinearcombinationofvectorsAB→&AC→.Sowecanwriteallpointsoftheplanelikethis:AD→=tAB→+uAC→→<x−xA,y−yA,z−zA>=t<xB−xA,yB−yA,zB−zA>+u<xC−xA,yC−yA,zC−zA>→{x=xA+t(xB−xA)+u(xC−xA)y=yA+t(yB−yA)+u(yC−yA)z=zA+t(zB−zA)+u(zC−zA)Wheret&uaretheparameters. Terms of Service Privacy Policy Contact: info@tinkutara.com FacebookTweetPin Post navigation Previous Previous post: Question-48983Next Next post: 1-pi-0-pi-e-2cos-d- Leave a Reply Cancel replyYour email address will not be published. Required fields are marked *Comment * Name * Save my name, email, and website in this browser for the next time I comment.