
Question Number 165357 by ajfour last updated on 31/Jan/22
Commented by ajfour last updated on 31/Jan/22
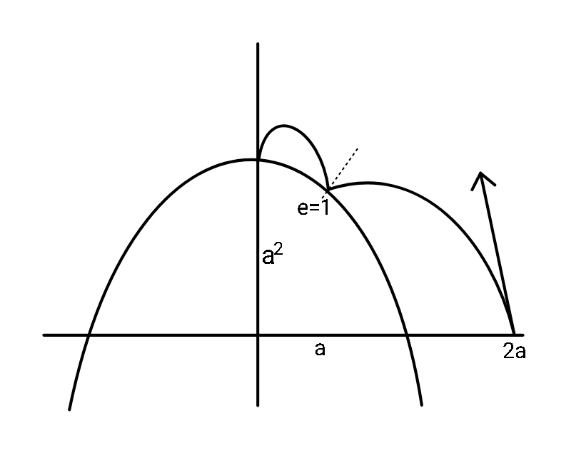
$${With}\:{what}\:\:{u}_{{min}} \:{is}\:{this}\:{possible}? \\ $$
Commented by ajfour last updated on 01/Feb/22
$${thanks}\:{sir},\:{i}\:{ll}\:{try}\:{to}\:{arrive}.. \\ $$
Answered by ajfour last updated on 01/Feb/22
$${Parabola}:\:\:{y}={a}^{\mathrm{2}} −{x}^{\mathrm{2}} \\ $$$${let}\:{at}\:{firsr}\:{collision}\:{point}\: \\ $$$${P}\:\left({b},\:{a}^{\mathrm{2}} −{b}^{\mathrm{2}} \right) \\ $$$$\frac{{dy}}{{dx}}=−\mathrm{2}{x}=−\mathrm{2}{b}=−\mathrm{tan}\:\theta \\ $$$$\Rightarrow\:\:\mathrm{tan}\:\theta=\mathrm{2}{b} \\ $$$${t}_{\mathrm{1}} =\frac{\mathrm{2}{a}−{b}}{{u}_{{x}} } \\ $$$${a}^{\mathrm{2}} −{b}^{\mathrm{2}} ={u}_{{y}} {t}_{\mathrm{1}} −\frac{{gt}_{\mathrm{1}} ^{\mathrm{2}} }{\mathrm{2}} \\ $$$$\Rightarrow\:{a}^{\mathrm{2}} −{b}^{\mathrm{2}} =\left(\mathrm{2}{a}−{b}\right)\mathrm{tan}\:\phi−\frac{{g}\left(\mathrm{2}{a}−{b}\right)^{\mathrm{2}} \left(\mathrm{1}+\mathrm{tan}\:^{\mathrm{2}} \phi\right)}{\mathrm{2}{u}^{\mathrm{2}} } \\ $$$${let}\:{just}\:{before}\:{reaching}\:{P} \\ $$$${v}_{{x}} ={u}_{{x}} \:,\:{v}_{{y}} ={u}_{{y}} −{gt}_{\mathrm{1}} \:\:\:\Rightarrow \\ $$$$\mathrm{tan}\:\phi=\left(\frac{{a}^{\mathrm{2}} −{b}^{\mathrm{2}} }{\mathrm{2}{a}−{b}}\right)+\frac{{g}\left(\mathrm{2}{a}−{b}\right)\left(\mathrm{1}+\mathrm{tan}\:^{\mathrm{2}} \phi\right)}{\mathrm{2}{u}^{\mathrm{2}} } \\ $$$$\:\:\:\:\:\:….\left({ii}\right) \\ $$$${or}\:\:\:\frac{\mathrm{2}{u}^{\mathrm{2}} }{{g}\left(\mathrm{1}+\mathrm{4}{b}^{\mathrm{2}} \right)}=\frac{\mathrm{2}{a}−{b}}{\left(\mathrm{tan}\:\phi−\frac{{a}^{\mathrm{2}} −{b}^{\mathrm{2}} }{\mathrm{2}{a}−{b}}\right)}\:\:..\left({I}\right) \\ $$$$\Rightarrow\:\:\frac{{v}_{{y}} }{{v}_{{x}} }=\mathrm{tan}\:\phi={A}+\frac{{B}}{{u}_{{x}} ^{\mathrm{2}} }\:\:\:…\left({i}\right) \\ $$$$\&\:\: \\ $$$${now}\:{due}\:{to}\:{reflection}\:{of}\:{velocity}, \\ $$$$\:\:{let}\:{just}\:{after}\:{hitting}\:{P}, \\ $$$${velocity}\:{be}\:{V}. \\ $$$$\:\:{V}_{{x}} \mathrm{cos}\:\theta+{V}_{{y}} \mathrm{sin}\:\theta={u}_{{x}} \mathrm{cos}\:\theta+{v}_{{y}} \mathrm{sin}\:\theta \\ $$$$\&\: \\ $$$$\:\:\:{V}_{{y}} \mathrm{cos}\:\theta−{V}_{{x}} \mathrm{sin}\:\theta={u}_{{x}} \mathrm{sin}\:\theta−{v}_{{y}} \mathrm{cos}\:\theta \\ $$$$\Rightarrow\:\:{V}_{{x}} +\mathrm{2}{bV}_{{y}} ={u}_{{x}} +\mathrm{2}{bv}_{{y}} \:\:\& \\ $$$$\:\:\:\:\:\:\:\:{V}_{{y}} −\mathrm{2}{bV}_{{x}} =\mathrm{2}{bu}_{{x}} −{v}_{{y}} \\ $$$$\Rightarrow\:\:{V}_{{y}} =\frac{\mathrm{4}{bu}_{{x}} +\left(\mathrm{4}{b}^{\mathrm{2}} −\mathrm{1}\right){v}_{{y}} }{\mathrm{4}{b}^{\mathrm{2}} +\mathrm{1}} \\ $$$$\:\:\:\:\:\:\:{V}_{{x}} =\frac{\mathrm{4}{bv}_{{y}} −\left(\mathrm{4}{b}^{\mathrm{2}} −\mathrm{1}\right){u}_{{x}} }{\mathrm{4}{b}^{\mathrm{2}} +\mathrm{1}} \\ $$$${t}_{\mathrm{2}} =\frac{{b}}{{V}_{{x}} }\:\:\&\:\:\:{b}^{\mathrm{2}} ={V}_{{y}} {t}_{\mathrm{2}} −\frac{{gt}_{\mathrm{2}} ^{\mathrm{2}} }{\mathrm{2}} \\ $$$$\Rightarrow\:{b}^{\mathrm{2}} ={b}\left(\frac{{V}_{{y}} }{{V}_{{x}} }\right)−\frac{{g}}{\mathrm{2}}\left(\frac{{b}}{{V}_{{x}} }\right)^{\mathrm{2}} \\ $$$$\Rightarrow\:{b}^{\mathrm{2}} \left\{\frac{\mathrm{4}{bv}_{{y}} −\left(\mathrm{4}{b}^{\mathrm{2}} −\mathrm{1}\right){u}_{{x}} }{\mathrm{4}{b}^{\mathrm{2}} +\mathrm{1}}\right\}^{\mathrm{2}} \\ $$$$\:\:={b}\left\{\frac{\mathrm{4}{bv}_{{y}} −\left(\mathrm{4}{b}^{\mathrm{2}} −\mathrm{1}\right){u}_{{x}} }{\mathrm{4}{b}^{\mathrm{2}} +\mathrm{1}}\right\}\left\{\frac{\mathrm{4}{bu}_{{x}} +\left(\mathrm{4}{b}^{\mathrm{2}} −\mathrm{1}\right){v}_{{y}} }{\mathrm{4}{b}^{\mathrm{2}} +\mathrm{1}}\right\} \\ $$$$\:\:\:\:\:\:\:−\frac{{b}^{\mathrm{2}} {g}}{\mathrm{2}} \\ $$$${using}\:..\left({i}\right)\:\&\:{u}_{{x}} ={u}\mathrm{cos}\:\phi,\:{u}_{{y}} ={u}\mathrm{sin}\:\phi \\ $$$${b}^{\mathrm{2}} \left\{\frac{\mathrm{4}{b}\mathrm{tan}\:\phi−\left(\mathrm{4}{b}^{\mathrm{2}} −\mathrm{1}\right)}{\mathrm{4}{b}^{\mathrm{2}} +\mathrm{1}}\right\}^{\mathrm{2}} \\ $$$$={b}\left\{\frac{\mathrm{4}{b}\mathrm{tan}\:\phi−\left(\mathrm{4}{b}^{\mathrm{2}} −\mathrm{1}\right)}{\mathrm{4}{b}^{\mathrm{2}} +\mathrm{1}}\right\}\left\{\frac{\mathrm{4}{b}+\left(\mathrm{4}{b}^{\mathrm{2}} −\mathrm{1}\right)\mathrm{tan}\:\phi}{\mathrm{4}{b}^{\mathrm{2}} +\mathrm{1}}\right\} \\ $$$$\:\:\:\:\:\:\:\:\:\:\:\:−\frac{{b}^{\mathrm{2}} {g}\left(\mathrm{1}+\mathrm{tan}\:^{\mathrm{2}} \phi\right)}{\mathrm{2}{u}^{\mathrm{2}} } \\ $$$$\:\:….\left({iii}\right) \\ $$$${u}\:{can}\:{be}\:{obtained}\:{in}\:{terms}\:{of} \\ $$$$\:\:\mathrm{tan}\:\phi. \\ $$$${by}\:{the}\:{way},\:{i}\:{think}\:{for}\:{u}_{{min}} \\ $$$$\:\:\:{V}_{{y}} ={gt}_{\mathrm{2}} \:\:=\:\:\frac{\mathrm{4}{bu}_{{x}} +\left(\mathrm{4}{b}^{\mathrm{2}} −\mathrm{1}\right){v}_{{y}} }{\mathrm{4}{b}^{\mathrm{2}} +\mathrm{1}} \\ $$$$\Rightarrow\:\:\frac{{bg}}{\left\{\frac{\mathrm{4}{bv}_{{y}} −\left(\mathrm{4}{b}^{\mathrm{2}} −\mathrm{1}\right){u}_{{x}} }{\mathrm{4}{b}^{\mathrm{2}} +\mathrm{1}}\right\}}=\frac{\mathrm{4}{bu}_{{x}} +\left(\mathrm{4}{b}^{\mathrm{2}} −\mathrm{1}\right){v}_{{y}} }{\mathrm{4}{b}^{\mathrm{2}} +\mathrm{1}} \\ $$$$\Rightarrow\:{bg}\left(\mathrm{4}{b}^{\mathrm{2}} +\mathrm{1}\right)^{\mathrm{2}} ={u}^{\mathrm{2}} \left\{\mathrm{4}{b}\mathrm{tan}\:\phi−\left(\mathrm{4}{b}^{\mathrm{2}} −\mathrm{1}\right)\right\}\left\{\mathrm{4}{b}+\left(\mathrm{4}{b}^{\mathrm{2}} −\mathrm{1}\right)\mathrm{tan}\:\phi\right\} \\ $$$$\&\:\:\frac{\mathrm{2}{u}^{\mathrm{2}} }{\left(\mathrm{1}+\mathrm{4}{b}^{\mathrm{2}} \right){g}}=\frac{\mathrm{2}{a}−{b}}{\left(\mathrm{tan}\:\phi−\frac{{a}^{\mathrm{2}} −{b}^{\mathrm{2}} }{\mathrm{2}{a}−{b}}\right)} \\ $$$$\Rightarrow\:\:\frac{\mathrm{2}{b}\left(\mathrm{1}+\mathrm{4}{b}^{\mathrm{2}} \right)\left(\mathrm{tan}\:\phi−\frac{{a}^{\mathrm{2}} −{b}^{\mathrm{2}} }{\mathrm{2}{a}−{b}}\right)}{\mathrm{2}{a}−{b}} \\ $$$$\:\:=\left\{\mathrm{4}{b}\mathrm{tan}\:\phi−\left(\mathrm{4}{b}^{\mathrm{2}} −\mathrm{1}\right)\right\}\left\{\mathrm{4}{b}+\left(\mathrm{4}{b}^{\mathrm{2}} −\mathrm{1}\right)\mathrm{tan}\:\phi\right\} \\ $$$$ \\ $$$$….{hopeless}…. \\ $$