
Question Number 165457 by mr W last updated on 02/Feb/22

Commented by MJS_new last updated on 02/Feb/22
$$\mathrm{I}\:\mathrm{would}\:\mathrm{like}\:\mathrm{you}\:\mathrm{to}\:\mathrm{check}\:\mathrm{this}: \\ $$$$\mathrm{from}\:\mathrm{Sir}\:\mathrm{Ajfour}'\mathrm{s}\:\mathrm{scetch}\:\mathrm{I}\:\mathrm{assumed}\:\mathrm{that}\:\mathrm{the} \\ $$$$“\mathrm{hill}''\:\mathrm{is}\:{y}=−{x}^{\mathrm{2}} +{a}^{\mathrm{2}} \:\mathrm{and}\:\mathrm{the}\:\mathrm{intersection}\:\mathrm{is} \\ $$$$\mathrm{at}\:{x}=\frac{\mathrm{1}}{\mathrm{2}}\:\mathrm{because}\:\mathrm{of}\:\mathrm{the}\:“{e}=\mathrm{1}''−\mathrm{mark};\:\mathrm{I} \\ $$$$\mathrm{understood}\:\mathrm{that}\:\mathrm{the}\:\mathrm{reflecting}\:\mathrm{tangent}\:\mathrm{has} \\ $$$$\mathrm{slope}\:−\mathrm{1} \\ $$$$\mathrm{from}\:\mathrm{there}\:\mathrm{I}\:\mathrm{found}\:\mathrm{this}: \\ $$$$\mathrm{for}\:{g}=−\mathrm{10}\:\mathrm{and}\:{a}=\mathrm{2}\:\mathrm{I}\:\mathrm{get}\:\mathrm{these}\:\mathrm{formulas}: \\ $$$$“\mathrm{hill}'':\:{y}=−{x}^{\mathrm{2}} +\mathrm{4} \\ $$$$\mathrm{par}_{\mathrm{1}} :\:{y}=−\mathrm{13}{x}^{\mathrm{2}} +\mathrm{6}{x}+\mathrm{4} \\ $$$$\mathrm{par}_{\mathrm{2}} :\:{y}=−\frac{\mathrm{13}}{\mathrm{49}}{x}^{\mathrm{2}} +\frac{\mathrm{6}}{\mathrm{49}}{x}+\frac{\mathrm{184}}{\mathrm{49}} \\ $$$$\mathrm{is}\:\mathrm{this}\:\mathrm{solution}\:\mathrm{ok},\:\mathrm{is}\:\mathrm{it}\:\mathrm{a}\:\mathrm{special}\:\mathrm{solution}\:\mathrm{in} \\ $$$$\mathrm{any}\:\mathrm{way}? \\ $$$$\mathrm{if}\:\mathrm{so},\:\mathrm{I}\:\mathrm{can}\:\mathrm{calculate}\:\mathrm{it}\:\mathrm{for}\:\mathrm{any}\:\mathrm{given}\:{a}\:\mathrm{and} \\ $$$$\mathrm{other}\:\mathrm{values}\:\mathrm{of}\:{g}\:\left(\mathrm{i}.\mathrm{e}.\:−\mathrm{9}.\mathrm{81}\right) \\ $$$$\mathrm{thank}\:\mathrm{you}! \\ $$
Commented by mr W last updated on 01/Feb/22

$${attempt}\:{for}\:{Q}\mathrm{165357} \\ $$
Commented by mr W last updated on 03/Feb/22

Commented by mr W last updated on 03/Feb/22
![note: projectile motion is reversible. the motion from start point A to end point B is the same as the motion from start point B to end point A, as if we just let the time run backward. that means when the ball starts from the ground at point B with a speed u and hits the hill at point P with a speed v, it is the same as when the ball starts from point P with speed v and hits the ground at point B with speed u. parabola y=c−(x^2 /d) collision atP (p, q) with q=c−(p^2 /d) tan θ=((2p)/d) α=(π/2)−φ+θ=ϕ+θ with ϕ=(π/2)−φ β=(π/2)−φ−θ=ϕ−θ motion from P to A: x=p−v cos α t y=q+v sin α t−((gt^2 )/2) A(0, c) p−v cos α t=0 t=(p/(v cos α)) q+v sin α−((gt^2 )/2)=c q+p tan α−((gp^2 (1+tan^2 α))/(2v^2 ))=c c−(p^2 /d)+p tan (ϕ+θ)−((gp^2 [1+tan^2 (ϕ+θ)])/(2v^2 ))=c let Φ=((2v^2 )/(gd)) ⇒1+((1+tan^2 (ϕ+θ))/Φ)−((d tan (ϕ+θ))/p)=0 ⇒Φ=((1+tan^2 (ϕ+θ))/((d/p) tan (ϕ+θ)−1)) motion from P to B: x=p+v cos β t y=q+v sin β t−((gt^2 )/2) B(b,0) with b=2a p+v cos β t=b t=((b−p)/(v cos β)) q+(b−p)tan β−((g(b−p)^2 (1+tan^2 β))/(2v^2 ))=0 ((cd−p^2 )/((b−p)^2 ))+(d/(b−p)) tan (ϕ−θ)−((1+tan^2 (ϕ−θ))/Φ)=0 ⇒Φ=((1+tan^2 (ϕ−θ))/(((cd−p^2 )/((b−p)^2 ))+(d/(b−p)) tan (ϕ−θ))) ((1+tan^2 (ϕ−θ))/(((cd−p^2 )/((b−p)^2 ))+(d/(b−p)) tan (ϕ−θ)))=((1+tan^2 (ϕ+θ))/((d/p) tan (ϕ+θ)−1)) let g=((cd−p^2 )/((b−p)^2 )), m=(d/(b−p)), n=(d/p) ((1+tan^2 (ϕ−θ))/(g+m tan (ϕ−θ)))=((1+tan^2 (ϕ+θ))/(n tan (ϕ+θ)−1)) ((1+(((tan ϕ−tan θ)/(1+tan ϕ tan θ)))^2 )/(g+m×((tan ϕ−tan θ)/(1+tan ϕ tan θ))))=((1+(((tan ϕ+tan θ)/(1−tan ϕ tan θ)))^2 )/(n×((tan ϕ+tan θ)/(1−tan ϕ tan θ))−1)) tan θ[(g+1)tan θ+m+n]tan^2 ϕ+[2(g−1)tan θ+(m−n)(1−tan^2 θ)]tan ϕ+g+1−(m+n)tan θ=0 with ξ=tan θ[(g+1)tan θ+m+n] ξ=((2p)/d)[(((cd−p^2 )/((b−p)^2 ))+1)((2p)/d)+(d/(b−p))+(d/p)] ξ=((4p^2 )/d^2 )(((cd−p^2 )/((b−p)^2 ))+1)+((2p)/(b−p))+2 ✓ η=2(g−1)tan θ+(m−n)(1−tan^2 θ) η=((4p)/d)(((cd−p^2 )/((b−p)^2 ))−1)+((d/(b−p))−(d/p))(1−((4p^2 )/d^2 )) ✓ λ=g+1−(m+n)tan θ λ=((cd−p^2 )/((b−p)^2 ))+1−((2p)/d)((d/(b−p))+(d/p)) λ=((cd−p^2 )/((b−p)^2 ))−((2p)/(b−p))−1 ✓ ⇒σ=tan ϕ=((−η+(√(η^2 −4ξλ)))/(2ξ)) Φ=((1+(((tan ϕ+tan θ)/(1−tan ϕ tan θ)))^2 )/(n×((tan ϕ+tan θ)/(1−tan ϕ tan θ))−1)) Φ=(((1−((2pσ)/d))^2 +(σ+((2p)/d))^2 )/([((d/p)+((2p)/d))σ+1](1−((2pσ)/d)))) Φ=(((1+σ^2 )(1+((4p^2 )/d^2 )))/([((d/p)+((2p)/d))σ+1](1−((2pσ)/d)))) ✓ we have u^2 =v^2 +2gq u^2 =v^2 +2g(c−(p^2 /d)) ((2u^2 )/(gd))=((2v^2 )/(gd))+(4/d)(c−(p^2 /d)) ((2u^2 )/(gd))=Φ−((4p^2 )/d^2 )+((4c)/d) (u/( (√(gd))))=U=(√((1/2)(Φ−((4p^2 )/d^2 )+((4c)/d)))) U=(√((1/2)(Φ−((4p^2 )/d^2 )+((4c)/d)))) from (dU/dp)=0 we get p corresponding to u_(min) and thus u_(min) . example: a=2m, d=1m, c=4m, b=4m U_(min) =3.0397 at p=0.3643 m u_(min) =9.612 m/s (see third diagram below)](https://www.tinkutara.com/question/Q165472.png)
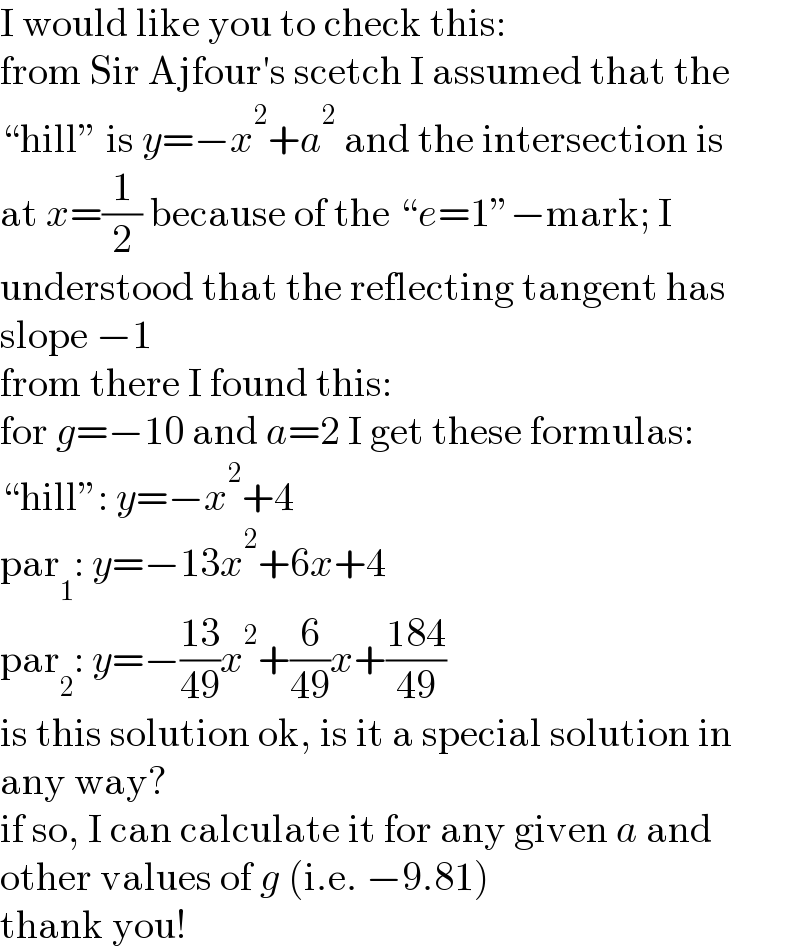
$$\underline{{note}:} \\ $$$${projectile}\:{motion}\:{is}\:{reversible}. \\ $$$${the}\:{motion}\:{from}\:{start}\:{point}\:{A}\:{to} \\ $$$${end}\:{point}\:{B}\:{is}\:{the}\:{same}\:{as}\:{the}\:{motion} \\ $$$${from}\:{start}\:{point}\:{B}\:{to}\:{end}\:{point}\:{A},\:{as} \\ $$$${if}\:{we}\:{just}\:{let}\:{the}\:{time}\:{run}\:{backward}. \\ $$$${that}\:{means}\:{when}\:{the}\:{ball}\:{starts}\:{from} \\ $$$${the}\:{ground}\:{at}\:{point}\:{B}\:{with}\:{a}\:{speed}\:{u}\: \\ $$$${and}\:{hits}\:{the}\:{hill}\:{at}\:{point}\:{P}\:{with}\:{a}\: \\ $$$${speed}\:{v},\:{it}\:{is}\:{the}\:{same}\:{as}\:{when}\:{the}\: \\ $$$${ball}\:{starts}\:{from}\:{point}\:{P}\:{with}\:{speed}\:{v} \\ $$$${and}\:{hits}\:{the}\:{ground}\:{at}\:{point}\:{B}\:{with}\: \\ $$$${speed}\:{u}. \\ $$$${parabola}\:{y}={c}−\frac{{x}^{\mathrm{2}} }{{d}} \\ $$$${collision}\:{atP}\:\left({p},\:{q}\right)\:{with}\:{q}={c}−\frac{{p}^{\mathrm{2}} }{{d}} \\ $$$$\mathrm{tan}\:\theta=\frac{\mathrm{2}{p}}{{d}} \\ $$$$\alpha=\frac{\pi}{\mathrm{2}}−\phi+\theta=\varphi+\theta\:{with}\:\varphi=\frac{\pi}{\mathrm{2}}−\phi \\ $$$$\beta=\frac{\pi}{\mathrm{2}}−\phi−\theta=\varphi−\theta \\ $$$$ \\ $$$${motion}\:{from}\:{P}\:{to}\:{A}: \\ $$$${x}={p}−{v}\:\mathrm{cos}\:\alpha\:{t} \\ $$$${y}={q}+{v}\:\mathrm{sin}\:\alpha\:{t}−\frac{{gt}^{\mathrm{2}} }{\mathrm{2}} \\ $$$${A}\left(\mathrm{0},\:{c}\right) \\ $$$${p}−{v}\:\mathrm{cos}\:\alpha\:{t}=\mathrm{0} \\ $$$${t}=\frac{{p}}{{v}\:\mathrm{cos}\:\alpha} \\ $$$${q}+{v}\:\mathrm{sin}\:\alpha−\frac{{gt}^{\mathrm{2}} }{\mathrm{2}}={c} \\ $$$${q}+{p}\:\mathrm{tan}\:\alpha−\frac{{gp}^{\mathrm{2}} \left(\mathrm{1}+\mathrm{tan}^{\mathrm{2}} \:\alpha\right)}{\mathrm{2}{v}^{\mathrm{2}} }={c} \\ $$$${c}−\frac{{p}^{\mathrm{2}} }{{d}}+{p}\:\mathrm{tan}\:\left(\varphi+\theta\right)−\frac{{gp}^{\mathrm{2}} \left[\mathrm{1}+\mathrm{tan}^{\mathrm{2}} \:\left(\varphi+\theta\right)\right]}{\mathrm{2}{v}^{\mathrm{2}} }={c} \\ $$$${let}\:\Phi=\frac{\mathrm{2}{v}^{\mathrm{2}} }{{gd}} \\ $$$$\Rightarrow\mathrm{1}+\frac{\mathrm{1}+\mathrm{tan}^{\mathrm{2}} \:\left(\varphi+\theta\right)}{\Phi}−\frac{{d}\:\mathrm{tan}\:\left(\varphi+\theta\right)}{{p}}=\mathrm{0} \\ $$$$\Rightarrow\Phi=\frac{\mathrm{1}+\mathrm{tan}^{\mathrm{2}} \:\left(\varphi+\theta\right)}{\frac{{d}}{{p}}\:\mathrm{tan}\:\left(\varphi+\theta\right)−\mathrm{1}} \\ $$$$ \\ $$$${motion}\:{from}\:{P}\:{to}\:{B}: \\ $$$${x}={p}+{v}\:\mathrm{cos}\:\beta\:{t} \\ $$$${y}={q}+{v}\:\mathrm{sin}\:\beta\:{t}−\frac{{gt}^{\mathrm{2}} }{\mathrm{2}} \\ $$$${B}\left({b},\mathrm{0}\right)\:{with}\:{b}=\mathrm{2}{a} \\ $$$${p}+{v}\:\mathrm{cos}\:\beta\:{t}={b} \\ $$$${t}=\frac{{b}−{p}}{{v}\:\mathrm{cos}\:\beta} \\ $$$${q}+\left({b}−{p}\right)\mathrm{tan}\:\beta−\frac{{g}\left({b}−{p}\right)^{\mathrm{2}} \left(\mathrm{1}+\mathrm{tan}^{\mathrm{2}} \:\beta\right)}{\mathrm{2}{v}^{\mathrm{2}} }=\mathrm{0} \\ $$$$\frac{{cd}−{p}^{\mathrm{2}} }{\left({b}−{p}\right)^{\mathrm{2}} }+\frac{{d}}{{b}−{p}}\:\mathrm{tan}\:\left(\varphi−\theta\right)−\frac{\mathrm{1}+\mathrm{tan}^{\mathrm{2}} \:\left(\varphi−\theta\right)}{\Phi}=\mathrm{0} \\ $$$$\Rightarrow\Phi=\frac{\mathrm{1}+\mathrm{tan}^{\mathrm{2}} \:\left(\varphi−\theta\right)}{\frac{{cd}−{p}^{\mathrm{2}} }{\left({b}−{p}\right)^{\mathrm{2}} }+\frac{{d}}{{b}−{p}}\:\mathrm{tan}\:\left(\varphi−\theta\right)} \\ $$$$ \\ $$$$\frac{\mathrm{1}+\mathrm{tan}^{\mathrm{2}} \:\left(\varphi−\theta\right)}{\frac{{cd}−{p}^{\mathrm{2}} }{\left({b}−{p}\right)^{\mathrm{2}} }+\frac{{d}}{{b}−{p}}\:\mathrm{tan}\:\left(\varphi−\theta\right)}=\frac{\mathrm{1}+\mathrm{tan}^{\mathrm{2}} \:\left(\varphi+\theta\right)}{\frac{{d}}{{p}}\:\mathrm{tan}\:\left(\varphi+\theta\right)−\mathrm{1}}\:\: \\ $$$${let}\:{g}=\frac{{cd}−{p}^{\mathrm{2}} }{\left({b}−{p}\right)^{\mathrm{2}} },\:{m}=\frac{{d}}{{b}−{p}},\:{n}=\frac{{d}}{{p}} \\ $$$$\frac{\mathrm{1}+\mathrm{tan}^{\mathrm{2}} \:\left(\varphi−\theta\right)}{{g}+{m}\:\mathrm{tan}\:\left(\varphi−\theta\right)}=\frac{\mathrm{1}+\mathrm{tan}^{\mathrm{2}} \:\left(\varphi+\theta\right)}{{n}\:\mathrm{tan}\:\left(\varphi+\theta\right)−\mathrm{1}}\:\: \\ $$$$\frac{\mathrm{1}+\left(\frac{\mathrm{tan}\:\varphi−\mathrm{tan}\:\theta}{\mathrm{1}+\mathrm{tan}\:\varphi\:\mathrm{tan}\:\theta}\right)^{\mathrm{2}} }{{g}+{m}×\frac{\mathrm{tan}\:\varphi−\mathrm{tan}\:\theta}{\mathrm{1}+\mathrm{tan}\:\varphi\:\mathrm{tan}\:\theta}}=\frac{\mathrm{1}+\left(\frac{\mathrm{tan}\:\varphi+\mathrm{tan}\:\theta}{\mathrm{1}−\mathrm{tan}\:\varphi\:\mathrm{tan}\:\theta}\right)^{\mathrm{2}} }{{n}×\frac{\mathrm{tan}\:\varphi+\mathrm{tan}\:\theta}{\mathrm{1}−\mathrm{tan}\:\varphi\:\mathrm{tan}\:\theta}−\mathrm{1}}\:\: \\ $$$$\mathrm{tan}\:\theta\left[\left({g}+\mathrm{1}\right)\mathrm{tan}\:\theta+{m}+{n}\right]\mathrm{tan}^{\mathrm{2}} \:\varphi+\left[\mathrm{2}\left({g}−\mathrm{1}\right)\mathrm{tan}\:\theta+\left({m}−{n}\right)\left(\mathrm{1}−\mathrm{tan}^{\mathrm{2}} \:\theta\right)\right]\mathrm{tan}\:\varphi+{g}+\mathrm{1}−\left({m}+{n}\right)\mathrm{tan}\:\theta=\mathrm{0} \\ $$$${with} \\ $$$$\xi=\mathrm{tan}\:\theta\left[\left({g}+\mathrm{1}\right)\mathrm{tan}\:\theta+{m}+{n}\right] \\ $$$$\xi=\frac{\mathrm{2}{p}}{{d}}\left[\left(\frac{{cd}−{p}^{\mathrm{2}} }{\left({b}−{p}\right)^{\mathrm{2}} }+\mathrm{1}\right)\frac{\mathrm{2}{p}}{{d}}+\frac{{d}}{{b}−{p}}+\frac{{d}}{{p}}\right] \\ $$$$\xi=\frac{\mathrm{4}{p}^{\mathrm{2}} }{{d}^{\mathrm{2}} }\left(\frac{{cd}−{p}^{\mathrm{2}} }{\left({b}−{p}\right)^{\mathrm{2}} }+\mathrm{1}\right)+\frac{\mathrm{2}{p}}{{b}−{p}}+\mathrm{2}\:\checkmark \\ $$$$\eta=\mathrm{2}\left({g}−\mathrm{1}\right)\mathrm{tan}\:\theta+\left({m}−{n}\right)\left(\mathrm{1}−\mathrm{tan}^{\mathrm{2}} \:\theta\right) \\ $$$$\eta=\frac{\mathrm{4}{p}}{{d}}\left(\frac{{cd}−{p}^{\mathrm{2}} }{\left({b}−{p}\right)^{\mathrm{2}} }−\mathrm{1}\right)+\left(\frac{{d}}{{b}−{p}}−\frac{{d}}{{p}}\right)\left(\mathrm{1}−\frac{\mathrm{4}{p}^{\mathrm{2}} }{{d}^{\mathrm{2}} }\right)\:\checkmark \\ $$$$\lambda={g}+\mathrm{1}−\left({m}+{n}\right)\mathrm{tan}\:\theta \\ $$$$\lambda=\frac{{cd}−{p}^{\mathrm{2}} }{\left({b}−{p}\right)^{\mathrm{2}} }+\mathrm{1}−\frac{\mathrm{2}{p}}{{d}}\left(\frac{{d}}{{b}−{p}}+\frac{{d}}{{p}}\right) \\ $$$$\lambda=\frac{{cd}−{p}^{\mathrm{2}} }{\left({b}−{p}\right)^{\mathrm{2}} }−\frac{\mathrm{2}{p}}{{b}−{p}}−\mathrm{1}\:\checkmark \\ $$$$\Rightarrow\sigma=\mathrm{tan}\:\varphi=\frac{−\eta+\sqrt{\eta^{\mathrm{2}} −\mathrm{4}\xi\lambda}}{\mathrm{2}\xi} \\ $$$$\Phi=\frac{\mathrm{1}+\left(\frac{\mathrm{tan}\:\varphi+\mathrm{tan}\:\theta}{\mathrm{1}−\mathrm{tan}\:\varphi\:\mathrm{tan}\:\theta}\right)^{\mathrm{2}} }{{n}×\frac{\mathrm{tan}\:\varphi+\mathrm{tan}\:\theta}{\mathrm{1}−\mathrm{tan}\:\varphi\:\mathrm{tan}\:\theta}−\mathrm{1}} \\ $$$$\Phi=\frac{\left(\mathrm{1}−\frac{\mathrm{2}{p}\sigma}{{d}}\right)^{\mathrm{2}} +\left(\sigma+\frac{\mathrm{2}{p}}{{d}}\right)^{\mathrm{2}} }{\left[\left(\frac{{d}}{{p}}+\frac{\mathrm{2}{p}}{{d}}\right)\sigma+\mathrm{1}\right]\left(\mathrm{1}−\frac{\mathrm{2}{p}\sigma}{{d}}\right)} \\ $$$$\Phi=\frac{\left(\mathrm{1}+\sigma^{\mathrm{2}} \right)\left(\mathrm{1}+\frac{\mathrm{4}{p}^{\mathrm{2}} }{{d}^{\mathrm{2}} }\right)}{\left[\left(\frac{{d}}{{p}}+\frac{\mathrm{2}{p}}{{d}}\right)\sigma+\mathrm{1}\right]\left(\mathrm{1}−\frac{\mathrm{2}{p}\sigma}{{d}}\right)}\:\checkmark \\ $$$$ \\ $$$${we}\:{have}\: \\ $$$${u}^{\mathrm{2}} ={v}^{\mathrm{2}} +\mathrm{2}{gq} \\ $$$${u}^{\mathrm{2}} ={v}^{\mathrm{2}} +\mathrm{2}{g}\left({c}−\frac{{p}^{\mathrm{2}} }{{d}}\right) \\ $$$$\frac{\mathrm{2}{u}^{\mathrm{2}} }{{gd}}=\frac{\mathrm{2}{v}^{\mathrm{2}} }{{gd}}+\frac{\mathrm{4}}{{d}}\left({c}−\frac{{p}^{\mathrm{2}} }{{d}}\right) \\ $$$$\frac{\mathrm{2}{u}^{\mathrm{2}} }{{gd}}=\Phi−\frac{\mathrm{4}{p}^{\mathrm{2}} }{{d}^{\mathrm{2}} }+\frac{\mathrm{4}{c}}{{d}} \\ $$$$\frac{{u}}{\:\sqrt{{gd}}}={U}=\sqrt{\frac{\mathrm{1}}{\mathrm{2}}\left(\Phi−\frac{\mathrm{4}{p}^{\mathrm{2}} }{{d}^{\mathrm{2}} }+\frac{\mathrm{4}{c}}{{d}}\right)} \\ $$$${U}=\sqrt{\frac{\mathrm{1}}{\mathrm{2}}\left(\Phi−\frac{\mathrm{4}{p}^{\mathrm{2}} }{{d}^{\mathrm{2}} }+\frac{\mathrm{4}{c}}{{d}}\right)} \\ $$$${from}\:\frac{{dU}}{{dp}}=\mathrm{0}\:{we}\:{get}\:{p}\:{corresponding} \\ $$$${to}\:{u}_{{min}} \:{and}\:{thus}\:{u}_{{min}} . \\ $$$$ \\ $$$$\underline{{example}:}\: \\ $$$${a}=\mathrm{2}{m},\:{d}=\mathrm{1}{m},\:{c}=\mathrm{4}{m},\:{b}=\mathrm{4}{m} \\ $$$${U}_{{min}} =\mathrm{3}.\mathrm{0397}\:{at}\:{p}=\mathrm{0}.\mathrm{3643}\:{m} \\ $$$${u}_{{min}} =\mathrm{9}.\mathrm{612}\:{m}/{s} \\ $$$$\left({see}\:{third}\:{diagram}\:{below}\right) \\ $$
Commented by mr W last updated on 02/Feb/22

Commented by mr W last updated on 02/Feb/22

Commented by mr W last updated on 03/Feb/22

Commented by MJS_new last updated on 02/Feb/22

$$\mathrm{am}\:\mathrm{I}\:\mathrm{wrong}\:\mathrm{here}?\:\mathrm{both}\:\mathrm{green}\:\mathrm{parabolas}\:\mathrm{must} \\ $$$$\mathrm{have}\:\mathrm{the}\:\mathrm{same}\:\mathrm{second}\:\mathrm{derivate}\:\mathrm{which}\:\mathrm{is} \\ $$$${y}_{\mathrm{1}} ^{''} ={y}_{\mathrm{2}} ''=−\mathrm{9}.\mathrm{81}.\:\mathrm{under}\:\mathrm{this}\:\mathrm{condition}\:\left(\mathrm{and}\right. \\ $$$$\left.\mathrm{the}\:\mathrm{other}\:\mathrm{given}\:\mathrm{conditions}\right)\:\mathrm{there}'\mathrm{s}\:\mathrm{no}\:\mathrm{solution}. \\ $$
Commented by mr W last updated on 02/Feb/22

$${it}'{s}\:{not}\:{correct}\:{with}\:{y}''=−{g}\:{sir}. \\ $$$${before}\:{and}\:{after}\:{point}\:{P}\:\:{the}\:{ball}\:{has} \\ $$$${the}\:{same}\:{speed},\:{but}\:{different}\: \\ $$$${direction}\:{angles}\:{to}\:{horizontal}, \\ $$$${therefore}\:{both}\:{green}\:{parabolas}\:{even} \\ $$$${must}\:{have}\:{different}\:{y}''\:{at}\:{this}\:{point}. \\ $$$${the}\:{diagrams}\:{show}\:{the}\:{real}\:{path}\:{of} \\ $$$${the}\:{ball}\:{when}\:{started}\:{with}\:{different} \\ $$$${initial}\:{speed}.\:{actually}\:{there}\:{are}\:{infinite} \\ $$$${many}\:{possible}\:{pathes}\:{for}\:{the}\:{ball}, \\ $$$${in}\:{one}\:{of}\:{them}\:{the}\:{ball}\:{needs}\:{the} \\ $$$${minimum}\:{energy}\:{to}\:{reach}\:{the}\:{peak} \\ $$$${of}\:{hill}. \\ $$$${approximately}\:{the}\:{highest}\:{point}\:{of}\: \\ $$$${green}\:{parabola}\:{shows}\:{the}\:{energy}\:{of}\: \\ $$$${the}\:{ball}.\:{so}\:{in}\:{the}\:{third}\:{path}\:{the}\:{ball}\: \\ $$$${needs}\:{less}\:{energy}\:{than}\:{in}\:{the}\:{other} \\ $$$${pathes}. \\ $$
Commented by MJS_new last updated on 02/Feb/22

$$\mathrm{but}\:\mathrm{the}\:\mathrm{only}\:\mathrm{acceleration}\:\mathrm{is}\:{g}.\:\mathrm{pkease} \\ $$$$\mathrm{explain}\:\mathrm{this}\:\mathrm{to}\:\mathrm{me}:\:\mathrm{if}\:\mathrm{the}\:\mathrm{parabola}\:\mathrm{is}\:{s} \\ $$$$\mathrm{then}\:{v}\:\mathrm{should}\:\mathrm{be}\:{s}'\:\mathrm{and}\:{a}=−{g}\:\mathrm{should}\:\mathrm{be}\:{s}'' \\ $$$$\mathrm{I}'\mathrm{m}\:\mathrm{not}\:\mathrm{good}\:\mathrm{in}\:\mathrm{these}\:\mathrm{things}… \\ $$
Commented by MJS_new last updated on 02/Feb/22

$$…\mathrm{haha},\:\mathrm{forgot}\:\mathrm{that}\:{y}''\:\mathrm{also}\:\mathrm{depends}\:\mathrm{on}\:{v}_{\mathrm{0}} \\ $$$$\mathrm{in}\:{x}−\mathrm{direction}.\:\mathrm{as}\:\mathrm{I}\:\mathrm{mentioned},\:\mathrm{I}'\mathrm{m}\:\mathrm{not} \\ $$$$\mathrm{good}\:\mathrm{at}\:\mathrm{physics} \\ $$
Commented by Tawa11 last updated on 02/Feb/22

$$\mathrm{Great}\:\mathrm{sir}. \\ $$
Commented by mr W last updated on 02/Feb/22

$${MJS}\:{sir}: \\ $$$${exactly}! \\ $$$${when}\:{the}\:{ball}\:{hits}\:{an}\:{inclined}\: \\ $$$${surface},\:{the}\:{horizontal}\:{component} \\ $$$${of}\:{speed}\:{changes},\:{therefore}\:{y}_{\mathrm{1}} ''\neq{y}_{\mathrm{2}} ''. \\ $$$${the}\:{horizontal}\:{component}\:{of}\:{speed} \\ $$$${decides}\:{if}\:{the}\:{parabola}\:{is}\:{flat}\:{or}\:{steep}, \\ $$$${i}.{e}.\:{if}\:{y}''\:{is}\:{small}\:{or}\:{large}. \\ $$
Commented by mr W last updated on 02/Feb/22

Commented by mr W last updated on 02/Feb/22

$${here}\:{e}\:{stands}\:{for}\:{restitution}\:{coef}.\:{of} \\ $$$${a}\:{collision}. \\ $$$$“{e}=\mathrm{1}''\:{means}\:{that}\:{the}\:{collision}\:{is} \\ $$$${perfectly}\:{elastic},\:{no}\:{energy}\:{goes}\:{lost}. \\ $$$${the}\:{ball}\:{behaves}\:{like}\:{a}\:{light}\:{ray}. \\ $$
Commented by MJS_new last updated on 02/Feb/22

$$\mathrm{ok}.\:\mathrm{anyway}\:\mathrm{my}\:\mathrm{solution}\:\mathrm{should}\:\mathrm{hold},\:\mathrm{because} \\ $$$$\mathrm{I}\:\mathrm{assumed}\:\mathrm{an}\:\mathrm{elastic}\:\mathrm{collision}.\:\mathrm{but}\:\mathrm{does}\:\mathrm{my} \\ $$$$\mathrm{solution}\:\mathrm{match}\:\mathrm{yours}\:\mathrm{in}\:\mathrm{this}\:\mathrm{special}\:\mathrm{case}? \\ $$
Commented by mr W last updated on 02/Feb/22

$${yes},\:{your}\:{solution}\:{is}\:{a}\:{possible}\:{path} \\ $$$${of}\:{the}\:{ball}.{but}\:{it}\:{is}\:{not}\:{the}\:{path}\:{of} \\ $$$${the}\:{ball}\:{with}\:{the}\:{minimum}\:{initial} \\ $$$${speed}. \\ $$
Commented by MJS_new last updated on 02/Feb/22

$$\mathrm{ok}.\:\mathrm{is}\:\mathrm{it}\:\mathrm{the}\:\mathrm{only}\:\mathrm{path}\:\mathrm{with}\:\mathrm{reflection}\:\mathrm{at} \\ $$$${x}=\frac{\mathrm{1}}{\mathrm{2}}\:\left(\mathrm{with}\:{g}=−\mathrm{10}\:\mathrm{and}\:{a}=\mathrm{2}\right)? \\ $$
Commented by mr W last updated on 02/Feb/22

$${yes}! \\ $$
Answered by mr W last updated on 03/Feb/22
/d)))) U=(u/( (√(gd))))=(√((1/2)(Φ−((4p^2 )/d^2 )+((4c)/d)))) U is a function of parameter p. it has a minimun. from (dU/dp)=0 we find U_(min) and thus u_(min) . see following example:](https://www.tinkutara.com/question/Q165537.png)
$$\underline{{Summary}\:{of}\:{solution}} \\ $$$${parabola}\:{y}={c}−\frac{{x}^{\mathrm{2}} }{{d}} \\ $$$${point}\:{on}\:{top}\:{of}\:{parabola}\:{A}\left(\mathrm{0},\:{c}\right) \\ $$$${point}\:{on}\:{ground}\:{B}\left({b},\:\mathrm{0}\right) \\ $$$${initial}\:{speed}\:{at}\:{point}\:{B}\:{is}\:{u}. \\ $$$${collision}\:{point}\:{P}\:{at}\:{x}={p} \\ $$$$\mathrm{0}<{p}<\frac{\mathrm{4}{c}−{d}+\sqrt{\left(\mathrm{4}{c}−{d}\right)^{\mathrm{2}} +\left(\mathrm{4}{bd}\right)^{\mathrm{2}} }}{\mathrm{8}{b}} \\ $$$${let} \\ $$$$\xi=\frac{\mathrm{4}{p}^{\mathrm{2}} }{{d}^{\mathrm{2}} }\left(\frac{{cd}−{p}^{\mathrm{2}} }{\left({b}−{p}\right)^{\mathrm{2}} }+\mathrm{1}\right)+\frac{\mathrm{2}{p}}{{b}−{p}}+\mathrm{2} \\ $$$$\eta=\frac{\mathrm{4}{p}}{{d}}\left(\frac{{cd}−{p}^{\mathrm{2}} }{\left({b}−{p}\right)^{\mathrm{2}} }−\mathrm{1}\right)+\left(\frac{{d}}{{b}−{p}}−\frac{{d}}{{p}}\right)\left(\mathrm{1}−\frac{\mathrm{4}{p}^{\mathrm{2}} }{{d}^{\mathrm{2}} }\right) \\ $$$$\lambda=\frac{{cd}−{p}^{\mathrm{2}} }{\left({b}−{p}\right)^{\mathrm{2}} }−\frac{\mathrm{2}{p}}{{b}−{p}}−\mathrm{1} \\ $$$$\sigma=\frac{−\eta+\sqrt{\eta^{\mathrm{2}} −\mathrm{4}\xi\lambda}}{\mathrm{2}\xi} \\ $$$$\Phi=\frac{\left(\mathrm{1}+\sigma^{\mathrm{2}} \right)\left(\mathrm{1}+\frac{\mathrm{4}{p}^{\mathrm{2}} }{{d}^{\mathrm{2}} }\right)}{\left[\left(\frac{{d}}{{p}}+\frac{\mathrm{2}{p}}{{d}}\right)\sigma+\mathrm{1}\right]\left(\mathrm{1}−\frac{\mathrm{2}{p}\sigma}{{d}}\right)} \\ $$$${U}=\frac{{u}}{\:\sqrt{{gd}}}=\sqrt{\frac{\mathrm{1}}{\mathrm{2}}\left(\Phi−\frac{\mathrm{4}{p}^{\mathrm{2}} }{{d}^{\mathrm{2}} }+\frac{\mathrm{4}{c}}{{d}}\right)} \\ $$$${U}\:{is}\:{a}\:{function}\:{of}\:{parameter}\:{p}.\:{it}\:{has} \\ $$$${a}\:{minimun}. \\ $$$${from}\:\frac{{dU}}{{dp}}=\mathrm{0}\:{we}\:{find}\:{U}_{{min}} \:{and}\:{thus}\:{u}_{{min}} . \\ $$$${see}\:{following}\:{example}: \\ $$
Commented by mr W last updated on 03/Feb/22

Commented by mr W last updated on 03/Feb/22

Commented by ajfour last updated on 03/Feb/22

$${I}'{ll}\:{go}\:{through}\:{all}\:{this}\:{sir},\:{given} \\ $$$${any}\:{dynamics},\:{there}\:{is}\:{a}\:{transport} \\ $$$${lag}…\underset{/} {<}\left(\underset{\:\sqrt{}} {\overset{\bullet\:\:\:\bullet} {\smile}}\right)\underset{\backslash} {>} \\ $$$$ \\ $$
Commented by mr W last updated on 03/Feb/22

$${thanks}\:{for}\:{attention}\:{sir}! \\ $$$${this}\:{is}\:{the}\:{only}\:{way}\:{i}\:{found}\:{to}\: \\ $$$${express}\:{the}\:{speed}\:{u}\:{in}\:{terms}\:{of}\:{only} \\ $$$${one}\:{variable}. \\ $$