
Question Number 29498 by ajfour last updated on 09/Feb/18

Commented by ajfour last updated on 09/Feb/18
$${Relate}\:{linear}\:{acceleration},\:{with} \\ $$$${position},\:{velocity},\:{angular}\:{velocity}, \\ $$$${and}\:{angular}\:{acceleration}. \\ $$
Answered by ajfour last updated on 09/Feb/18
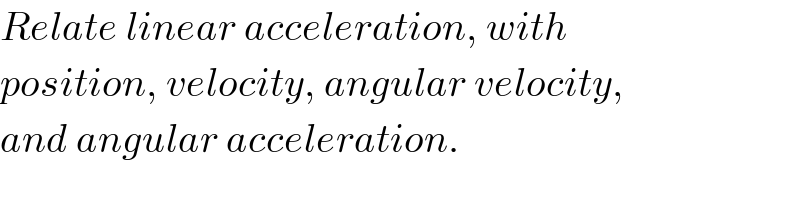
![Acceleration:_(__________________) ds^� = r_(xy) (−sin ψi^� +cos ψj^� )dψ +r_(yz) (−sin θj^� +cos θk^� )dθ +r_(zx) (−sin φk^� +cos φi^� )dφ +dr(((xi^� +yj^� +k^� )/r)) =(zdφ−ydψ)i^� +(xdψ−zdθ)j^� +(ydθ−xdφ)k^� +(dr/r)(xi^� +yj^� +k^� ) ⇒ ds^� = [(i^� ,j^� ,k^� ),(dθ,dφ,dψ),(x,y,z) ]+ (dr/r)(xi^� +yj^� +zk^� ) (ds^� /dt)= v^� =ω^� ×r^� +(1/r)((dr/dt))r^� ⇒ a^� = α^� ×r^� +ω^� ×v^� −(1/r^2 )((dr/dt))^2 r^� +(1/r)((d^2 r/dt^2 ))r^� +(1/r)((dr/dt))v^� a^� =α^� ×r^� +ω^� ×(ω^� ×r^� )+(1/r)((dr/dt))(ω^� ×r^� ) −(1/r^2 )((dr/dt))^2 r^� +(1/r)((d^2 r/dt^2 ))r^� + +(1/r)((dr/dt))(ω^� ×r^� )+(1/r^2 )((dr/dt))^2 r^� a^� = 𝛂^� ×r^� + 𝛚^� ×(𝛚^� ×r^� ) + (1/r)((d^2 r/dt^2 ))r^� +(2/r)((dr/dt))(𝛚^� ×r^� ) −−−−−−−−−−−−−−−](https://www.tinkutara.com/question/Q29502.png)
$$\:\:\:\underset{\_\_\_\_\_\_\_\_\_\_\_\_\_\_\_\_\_\_} {\boldsymbol{{Acceleration}}:}\: \\ $$$${d}\bar {{s}}\:=\:{r}_{{xy}} \left(−\mathrm{sin}\:\psi\hat {{i}}+\mathrm{cos}\:\psi\hat {{j}}\right){d}\psi \\ $$$$\:\:\:\:\:\:\:\:+{r}_{{yz}} \left(−\mathrm{sin}\:\theta\hat {{j}}+\mathrm{cos}\:\theta\hat {{k}}\right){d}\theta \\ $$$$\:\:\:\:\:\:\:\:+{r}_{{zx}} \left(−\mathrm{sin}\:\phi\hat {{k}}+\mathrm{cos}\:\phi\hat {{i}}\right){d}\phi \\ $$$$\:\:\:\:\:\:\:\:\:+{dr}\left(\frac{{x}\hat {{i}}+{y}\hat {{j}}+\hat {{k}}}{{r}}\right) \\ $$$$\:\:\:\:\:\:=\left({zd}\phi−{yd}\psi\right)\hat {{i}}+\left({xd}\psi−{zd}\theta\right)\hat {{j}} \\ $$$$\:\:\:\:\:\:+\left({yd}\theta−{xd}\phi\right)\hat {{k}}+\frac{{dr}}{{r}}\left({x}\hat {{i}}+{y}\hat {{j}}+\hat {{k}}\right) \\ $$$$\Rightarrow\:{d}\bar {{s}}\:=\begin{bmatrix}{\hat {{i}}}&{\hat {{j}}}&{\hat {{k}}}\\{{d}\theta}&{{d}\phi}&{{d}\psi}\\{{x}}&{{y}}&{{z}}\end{bmatrix}+\:\frac{{dr}}{{r}}\left({x}\hat {{i}}+{y}\hat {{j}}+{z}\hat {{k}}\right) \\ $$$$\frac{{d}\bar {{s}}}{{dt}}=\:\bar {{v}}=\bar {\omega}×\bar {{r}}\:+\frac{\mathrm{1}}{{r}}\left(\frac{{dr}}{{dt}}\right)\bar {{r}} \\ $$$$\Rightarrow\:\bar {\boldsymbol{{a}}}\:=\:\bar {\alpha}×\bar {{r}}+\bar {\omega}×\bar {{v}}−\frac{\mathrm{1}}{{r}^{\mathrm{2}} }\left(\frac{{dr}}{{dt}}\right)^{\mathrm{2}} \bar {{r}} \\ $$$$\:\:\:\:\:\:\:\:\:\:\:\:\:+\frac{\mathrm{1}}{{r}}\left(\frac{{d}^{\mathrm{2}} {r}}{{dt}^{\mathrm{2}} }\right)\bar {{r}}+\frac{\mathrm{1}}{{r}}\left(\frac{{dr}}{{dt}}\right)\bar {{v}} \\ $$$$\bar {{a}}=\bar {\alpha}×\bar {{r}}+\bar {\omega}×\left(\bar {\omega}×\bar {{r}}\right)+\frac{\mathrm{1}}{{r}}\left(\frac{{dr}}{{dt}}\right)\left(\bar {\omega}×\bar {{r}}\right) \\ $$$$\:\:\:\:\:\:\:\:\:\:\:\:\:\:−\frac{\mathrm{1}}{{r}^{\mathrm{2}} }\left(\frac{{dr}}{{dt}}\right)^{\mathrm{2}} \bar {{r}}+\frac{\mathrm{1}}{{r}}\left(\frac{{d}^{\mathrm{2}} {r}}{{dt}^{\mathrm{2}} }\right)\bar {{r}}+ \\ $$$$\:\:\:\:\:\:\:\:\:\:\:\:\:\:+\frac{\mathrm{1}}{{r}}\left(\frac{{dr}}{{dt}}\right)\left(\bar {\omega}×\bar {{r}}\right)+\frac{\mathrm{1}}{{r}^{\mathrm{2}} }\left(\frac{{dr}}{{dt}}\right)^{\mathrm{2}} \bar {{r}} \\ $$$$\:\:\:\:\bar {\boldsymbol{{a}}}=\:\:\bar {\boldsymbol{\alpha}}×\bar {\boldsymbol{{r}}}\:\:+\:\:\bar {\boldsymbol{\omega}}×\left(\bar {\boldsymbol{\omega}}×\bar {\boldsymbol{{r}}}\right) \\ $$$$\:\:\:\:\:\:\:\:+\:\frac{\mathrm{1}}{\boldsymbol{{r}}}\left(\frac{\boldsymbol{{d}}^{\mathrm{2}} \boldsymbol{{r}}}{\boldsymbol{{dt}}^{\mathrm{2}} }\right)\bar {\boldsymbol{{r}}}\:+\frac{\mathrm{2}}{\boldsymbol{{r}}}\left(\frac{\boldsymbol{{dr}}}{\boldsymbol{{dt}}}\right)\left(\bar {\boldsymbol{\omega}}×\bar {\boldsymbol{{r}}}\right) \\ $$$$−−−−−−−−−−−−−−− \\ $$