
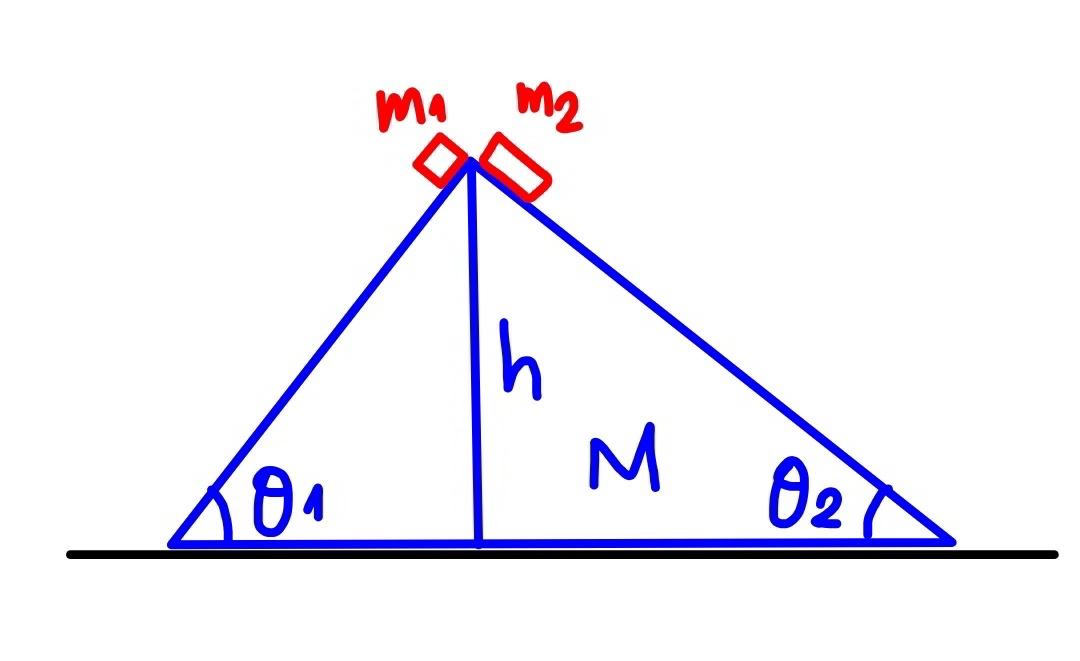
Question Number 82726 by mr W last updated on 23/Feb/20
Commented by mr W last updated on 23/Feb/20
Commented by TawaTawa last updated on 23/Feb/20

Commented by ajfour last updated on 23/Feb/20
Commented by TawaTawa last updated on 23/Feb/20

Commented by ajfour last updated on 23/Feb/20
Commented by ajfour last updated on 23/Feb/20
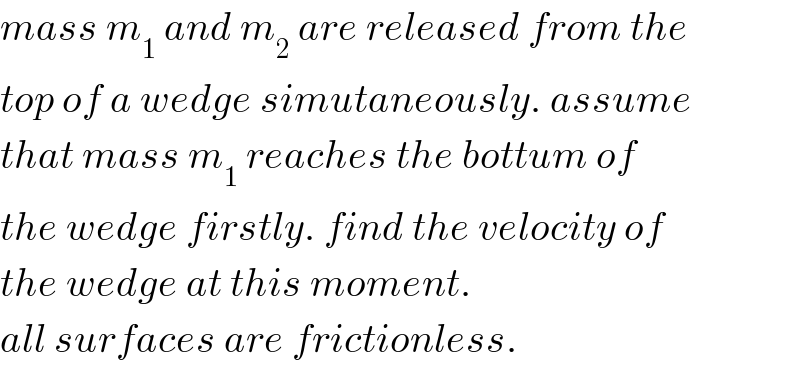
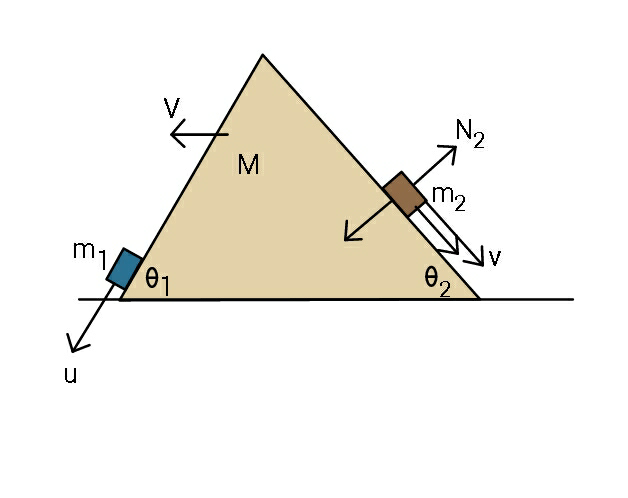
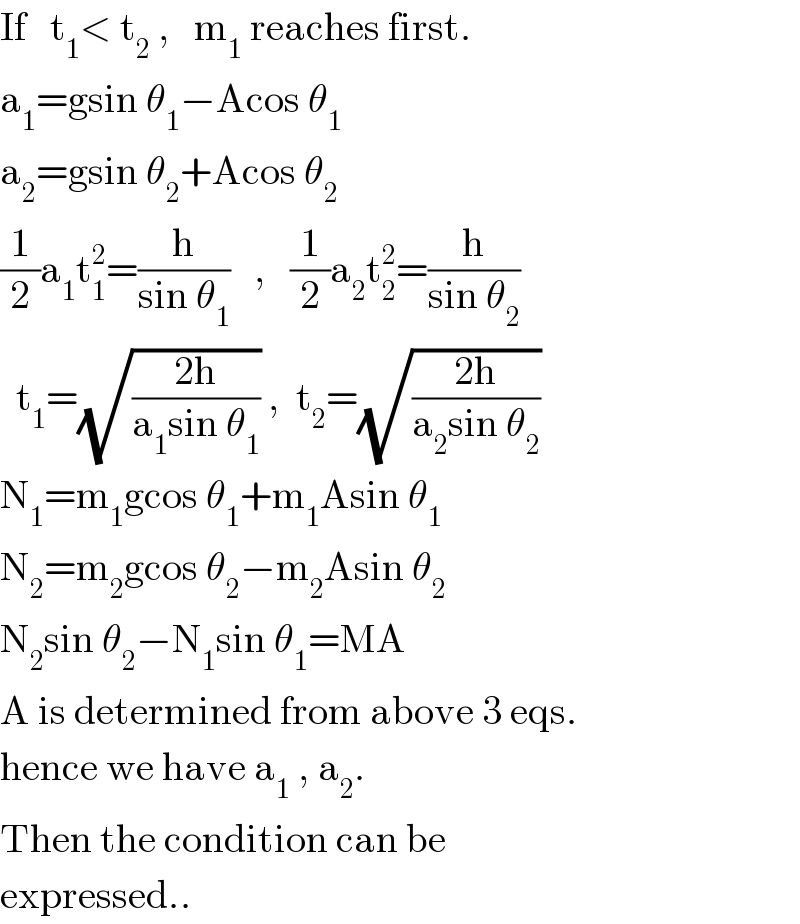
![a_1 =gsin θ_1 −Acos θ_1 a_2 =gsin θ_2 +Acos θ_2 (h/(sin θ_1 ))=(1/2)(gsin θ_1 −Acos θ_1 )t^2 ⇒ ((2h)/(sin θ_1 ))=gt^2 sin θ_1 −Vtcos θ_1 ..(i) [ from above eq. we get t(V)] u=(gsin θ_1 −Acos θ_1 )t = gtsin θ_1 −Vcos θ_2 .....(ii) v=gtsin θ_2 +Vcos θ_2 .....(iii) m_1 ucos θ_1 +(M+m_1 +m_2 )V = m_2 vcos θ_2 .....(iv) using (i), (ii), (iii), (iv) V is obtained...](https://www.tinkutara.com/question/Q82745.png)
Commented by mr W last updated on 23/Feb/20
Commented by mr W last updated on 24/Feb/20
Commented by ajfour last updated on 24/Feb/20
Commented by mr W last updated on 24/Feb/20
