Question and Answers Forum

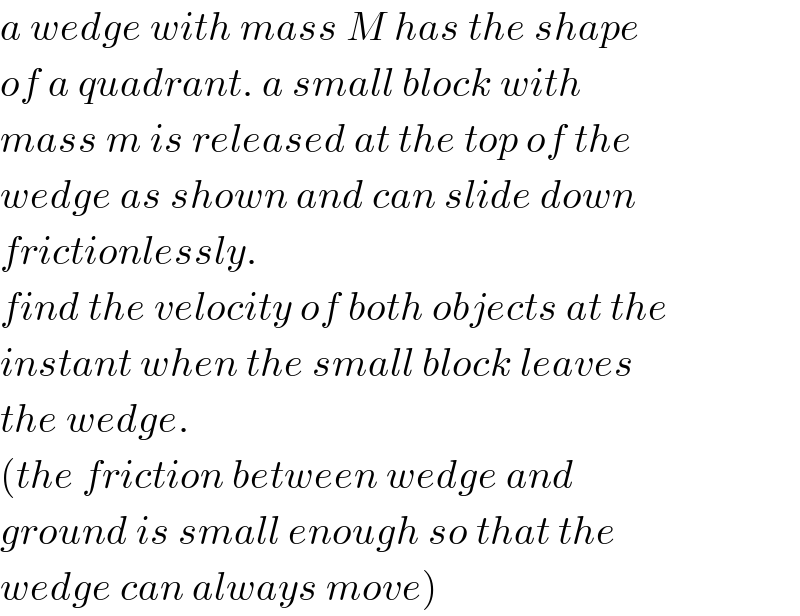
Question Number 103072 by mr W last updated on 12/Jul/20

Commented by ajfour last updated on 12/Jul/20

Commented by mr W last updated on 12/Jul/20
Commented by Dwaipayan Shikari last updated on 12/Jul/20
Commented by mr W last updated on 12/Jul/20
Commented by ajfour last updated on 13/Jul/20
![let radius of quadrant be r. System: Wedge_(−) Nsin θ+Mg=R ......(i) Ncos θ−μR=mA .......(ii) block (relative to wedge):_(−) mAcos θ+N−mgsin θ=((mu^2 )/r) (iii) mAsin θ+mgcos θ=((mudu)/(rdθ)) ..(iv) ________________________ from (i) & (ii) N(cos θ−μsin θ)−μMg=mA now using (iii) (mgsin θ+((mu^2 )/r)−mAcos θ)× (cos θ−μsin θ)−μMg=mA ⇒ A=(((cos θ−μsin θ)(gsin θ+(u^2 /r))−μ((M/m))g)/(1+cos θ(cos θ−μsin θ))) substituting this in (iv) ((udu)/(rdθ))=(([(cos θ−μsin θ)(gsin θ+(u^2 /r))−μ((M/m))g]sin θ)/(1+cos θ(cos θ−μsin θ))) +gcos θ If we are able to solve this D.E. we get u(θ). Let (u^2 /(rg))=t ; sin θ=s ⇒ ((udu)/(rg))=(dt/2) & cos θdθ=ds (1/2)(dt/ds)=((t[(1−((μs)/(√(s^2 +1))))(s+t)−μ((M/m))])/((1−s^2 −((μs)/(s^2 +1)))))+1 then we obtain A(θ) then V(θ) and v(θ) we then set θ=(π/2) , angular position of block when it leaves contact with wedge; (for m≪M)](Q103104.png)
Commented by mr W last updated on 12/Jul/20
Commented by ajfour last updated on 12/Jul/20
Commented by mr W last updated on 12/Jul/20

Commented by mr W last updated on 12/Jul/20
Answered by ajfour last updated on 13/Jul/20