Question and Answers Forum

Question Number 108597 by bemath last updated on 18/Aug/20
Answered by 1549442205PVT last updated on 18/Aug/20
![Set I=∫cos(lnx)dx,J=∫sin(lnx)dx By integrating by parts we have I=xcos(lnx)−∫x.(−sin(lnx)).(1/x)dx =xcos(lnx)+J⇒I−J=xcos(lnx)(1) J=∫sin(lnx)dx=xsin(lnx)−∫x.cos(lnx).(1/x)dx =xsin(lnx)−J⇒I+J=xsin(lnx)(2) Solve the system of equations (1)(2) we get { ((I=∫cos(lnx)dx=((x[(cos(lnx)+sin(lnx)])/2)+C)),((J=∫sin(lnx)dx=((x[sin(lnx)−cos(lnx)])/2)+C )) :}](Q108603.png)
Commented by bemath last updated on 18/Aug/20

Answered by bemath last updated on 18/Aug/20

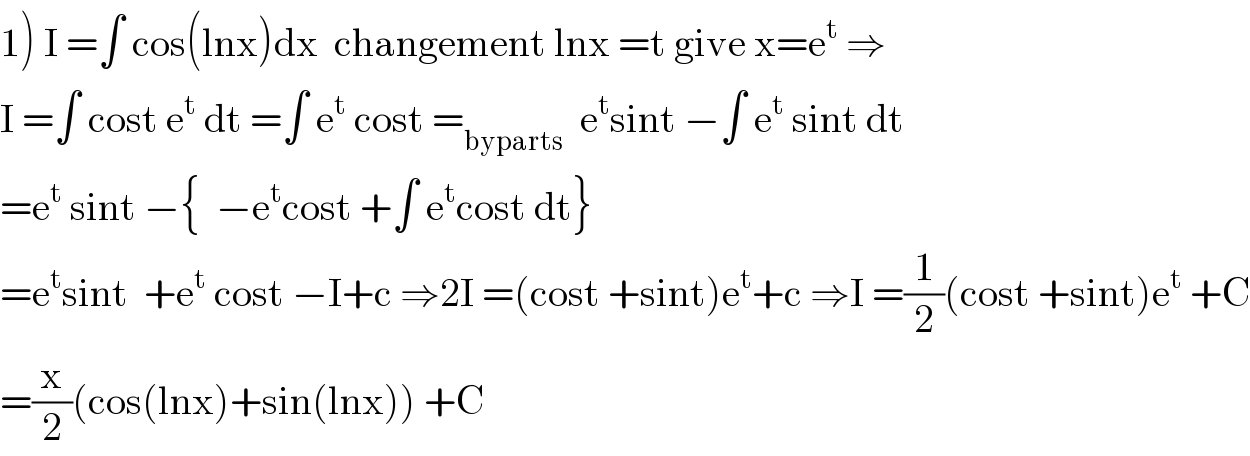
Answered by mathmax by abdo last updated on 18/Aug/20