
Question and Answers Forum

Question Number 113444 by Ar Brandon last updated on 13/Sep/20
Answered by Ar Brandon last updated on 13/Sep/20
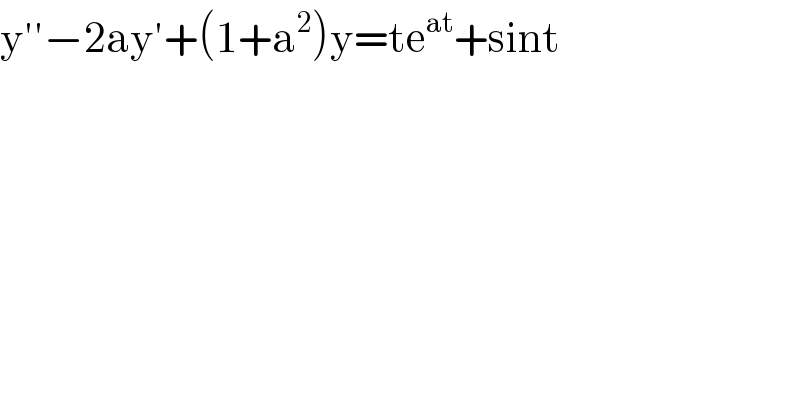
![y′′−2ay′+(1+a^2 )y=te^(at) +sint (h)→r^2 −2ar+1+a^2 =0⇒r=((2a±(√(4a^2 −4(1+a^2 ))))/2)=a±i y_h =e^(at) (Acost+Bsint) By varying parameters let; y_p =A(t)e^(at) cost+B(t)e^(at) sint ⇒y_p =au_1 +bu_2 { ((a′u_1 +b′u_2 =0),(...(1))),((a′u_1 ′+b′u_2 ′=te^(at) +sint),(...(2))) :} Finding a′ and b′ using Crammer′s method; W(u_1 ,u_2 )= determinant ((u_1 ,u_2 ),((u_1 ′),(u_2 ′)))= determinant (((e^(at) cost),(e^(at) sint)),((ae^(at) cost−e^(at) sint),(e^(at) cost+ae^(at) sint))) =e^(2at) [(cos^2 t+asintcost)−(asintcost−sin^2 t)]=e^(2at) w_1 = determinant ((0,(e^(at) sint)),((te^(at) +sint),(e^(at) cost+ae^(at) sint)))=−(te^(2at) sint+e^(at) sin^2 t) w_2 = determinant (((e^(at) cost),0),((ae^(at) cost−e^(at) sint),(te^(at) +sint)))=te^(2at) cost+e^(at) sintcost a′=(w_1 /W)⇒a=∫(w_1 /W)dt , b′=(w_2 /W)⇒b=∫(w_2 /W)dt ⇒A(t)=−∫((te^(2at) sint+e^(at) sin^2 t)/e^(2at) )dt, B(t)=∫((te^(2at) cost+e^(at) sintcost)/e^(2at) )dt A(t)=−∫(tsint+e^(−at) sin^2 t)dt ∫tsintdt=−tcost+∫costdt=sint−tcost ∫e^(−at) sin^2 tdt=−((sin^2 t)/a)∙e^(−at) +(2/a)∫sintcost∙e^(−at) dt =−((sin^2 t)/a)∙e^(−at) +(1/a)∫sin(2t)e^(−at) dt =−((sin^2 t)/a)∙e^(−at) +(1/a){−((sin(2t))/a)e^(−at) +(2/a)∫cos(2t)e^(−at) dt} =−((sin^2 t)/a)∙e^(−at) −((sin(2t))/a^2 )e^(−at) +(2/a^2 )[−((cos(2t))/a)e^(−at) −(2/a)∫sin(2t)e^(−at) dt] =−((sin^2 t)/a)∙e^(−at) −((sin(2t))/a^2 )e^(−at) −((2cos(2t))/a^3 )e^(−at) −(4/a^3 )∫sin(2t)e^(−at) dt =−((sin^2 t)/a)∙e^(−at) +(a^3 /(a^2 +4))[−((sin(2t))/a^2 )e^(−at) −((2cos(2t))/a^3 )e^(−at) ]+C ⇒A(t)=tcost−sint+((sin^2 t)/a)∙e^(−at) +(a^3 /(a^2 +4))[((sin(2t))/a^2 )e^(−at) +((2cos(2t))/a^3 )e^(−at) ]+C B(t)=∫((te^(2at) cost+e^(at) sintcost)/e^(2at) )dt=∫(tcost+e^(−at) sintcost)dt ∫tcostdt=tsint−∫sintdt=tsint+cost ∫e^(−at) sintcostdt=(1/2)∫e^(−at) sin(2t)dt =(1/2)∙(a^4 /(a^2 +4))[−((sin(2t))/a^2 )e^(−at) −((2cos(2t))/a^3 )e^(−at) ]+K ⇒B(t)=tsint+cost+(1/2)∙(a^4 /(a^2 +4))[−((sin(2t))/a^2 )e^(−at) −((2cos(2t))/a^3 )e^(−at) ]+K Or y_p =A(t)e^(at) cost+B(t)e^(at) sint et y_G =y_h +y_p y_G =e^(at) (Acost+Bsint)+e^(at) tcos^2 t−e^(at) sintcost+((sin^2 tcost)/a)+((a^3 cost)/(a^2 +4))[((sin(2t))/a^2 )+((2cos(2t))/a^3 )]+Ce^(at) cost e^(at) tsintcost+e^(at) cos^2 t+(1/2)∙((a^4 cost)/(a^2 +4))[−((sin(2t))/a^2 )−((2cos(2t))/a^3 )]+Ke^(at) cost](Q113446.png)
Commented by bemath last updated on 13/Sep/20

Commented by bobhans last updated on 13/Sep/20

Commented by Ar Brandon last updated on 13/Sep/20
��