
Question and Answers Forum

Question Number 113452 by mathdave last updated on 13/Sep/20

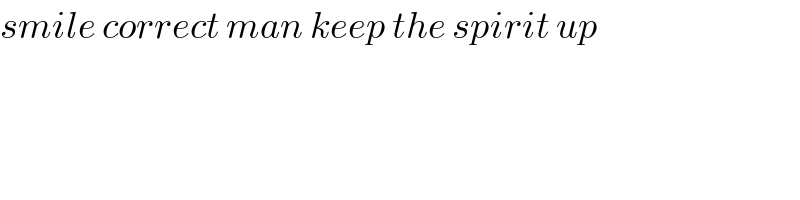
Answered by maths mind last updated on 13/Sep/20
![x=sin(t) ⇒=∫_0 ^(π/2) ((tcos(t)dt)/(sin(t)+cos(t)))=I J=∫_0 ^(π/2) ((tsin(t))/(sin(t)+cos(t)))dt I+J=∫_0 ^(π/2) tdt=(π^2 /8) I−J=∫_0 ^(π/2) t((cos(t)−sin(t))/(sin(t)+cos(t)))dt IBP =[tln(sin(t)+cos(t))]_0 ^(π/2) −∫_0 ^(π/2) ln(sin(t)+cos(t))dt =−∫_0 ^(π/2) ln((√(2c))os((π/4)−t))dt =−∫_0 ^(π/2) ln((√2))dt−∫_0 ^(π/4) ln(cos((π/4)−t))dt−∫_(π/4) ^(π/2) ln(cos((π/4)−t))dt =−(π/4)ln(2)−∫_0 ^(π/4) cos(t)dt+∫_0 ^(π/4) cos((π/4)−(u+(π/4)))du =−(π/4)ln(2)−2∫_0 ^(π/4) ln(cos(t))dt lets find ∫_0 ^(π/4) ln(cos(t))dt_(=A) we use G=−∫_0 ^(π/4) ln(tg(t))dt=catalan Constante and call B=∫_0 ^(π/4) ln(sin(t))dt A−B=G A+B=∫_0 ^(π/4) ln(sin(2t)/2)dt=−ln(2)(π/4)+(1/2)∫_0 ^(π/2) ln(sin(x))dx =((−ln(2)π)/4)+(1/2).−((πlog(2))/2)=−((πlog(2))/2) A=(1/2)(G−π((log(2))/2)) I−J=−((πln(2))/4)−2.(1/2)(G−πlog(2).(1/2)) =−G+((πlog(2))/4) I=(1/2)(−G+((πlog(2))/4)+(π^2 /8))=∫_0 ^1 ((sin^(−1) (x))/(x+(√(1−x^2 ))))dx⋍0.431](Q113538.png)
Commented by mathdave last updated on 14/Sep/20
Commented by Tawa11 last updated on 06/Sep/21

| ||
Question and Answers Forum | ||
| ||
Question Number 113452 by mathdave last updated on 13/Sep/20 | ||
| ||
Answered by maths mind last updated on 13/Sep/20 | ||
| ||
| ||
Commented by mathdave last updated on 14/Sep/20 | ||
| ||
Commented by Tawa11 last updated on 06/Sep/21 | ||
| ||