Question and Answers Forum

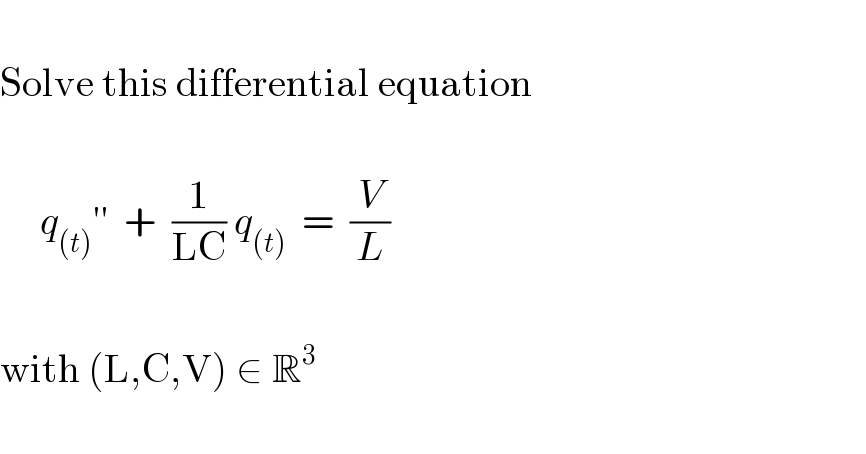
Question Number 125685 by Hassen_Timol last updated on 12/Dec/20
Answered by mr W last updated on 13/Dec/20

Commented by Hassen_Timol last updated on 13/Dec/20

Commented by Hassen_Timol last updated on 13/Dec/20
Isn't it ...+VC ? not VC² ? because V*L*C/L=VC
Commented by mr W last updated on 13/Dec/20

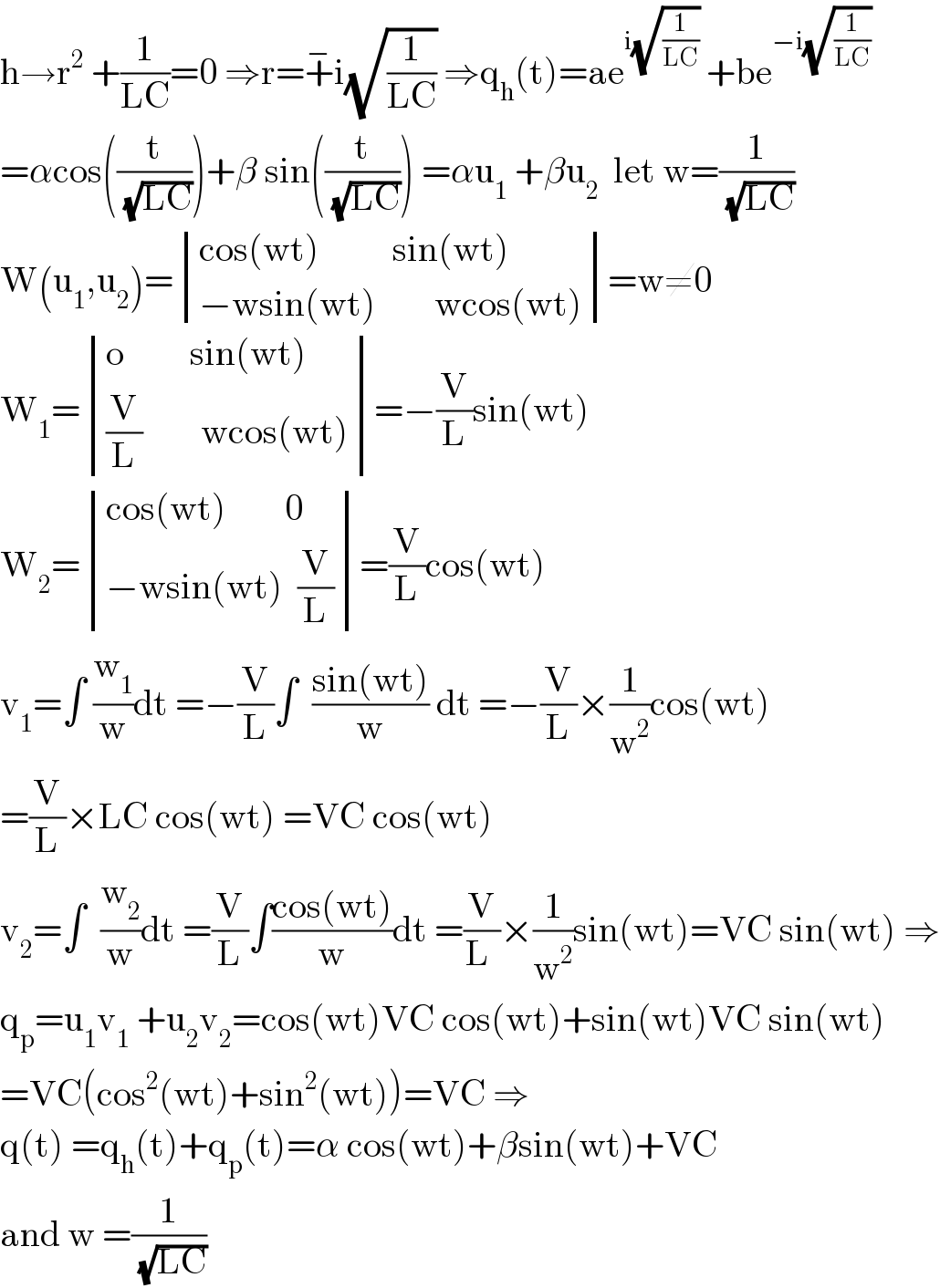
Answered by mathmax by abdo last updated on 14/Dec/20