Question and Answers Forum

Question Number 126203 by frc2crc last updated on 18/Dec/20
Answered by Olaf last updated on 18/Dec/20
![1+x^s +x^(2s) = 0 (x^s −e^(i((2π)/3)) )(x^s −e^(−i((2π)/3)) ) = 0 x = e^(i(((2π)/(3s))+((2kπ)/s))) or x = e^(i(−((2π)/(3s))+((2kπ)/s))) , k = 0...s−1 x = e^(i((2π)/s)(2k+(1/3))) or x = e^(i((2π)/s)(2k−(1/3))) , k = 0...s−1 Let x_k ^⊕ = e^(i((2π)/s)(2k+(1/3))) and x_k ^⊝ = e^(i((2π)/s)(2k−(1/3))) R(x) = (1/(1+x^s +x^(2s) )) R(x) = (1/(Π_(k=0) ^(s−1) (x−x_k ^⊕ )×Π_(k=0) ^(s−1) (x−x_k ^⊝ ))) R(x) = Σ_(p=0) ^(s−1) (A_p ^⊕ /(x−x_p ^⊕ ))+Σ_(p=0) ^(s−1) (A_p ^⊝ /(x−x_p ^⊝ )) A_p ^⊕ = (1/(Π_(k=0_(k≠p) ) ^(s−1) (x_p ^⊕ −x_k ^⊕ )×Π_(k=0) ^(s−1) (x_p ^⊕ −x_k ^⊝ ))) A_p ^⊝ = (1/(Π_(k=0) ^(s−1) (x_p ^⊝ −x_k ^⊕ )×Π_(k=0_(k≠p) ) ^(s−1) (x_p ^⊝ −x_k ^⊝ ))) I = ∫_0 ^∞ R(x)dx I = Σ_(p=0) ^(s−1) ∫_0 ^∞ [(A_p ^⊕ /(x−x_p ^⊕ ))+(A_p ^⊝ /(x−x_p ^⊝ ))]dx I = Σ_(p=0) ^(s−1) [A_p ^⊕ ln∣x−x_p ^⊕ ∣+A_p ^⊝ ln∣x−x_p ^⊝ ∣]_0 ^∞ ...to be continued... I′m not sure it′s a good way...](Q126245.png)
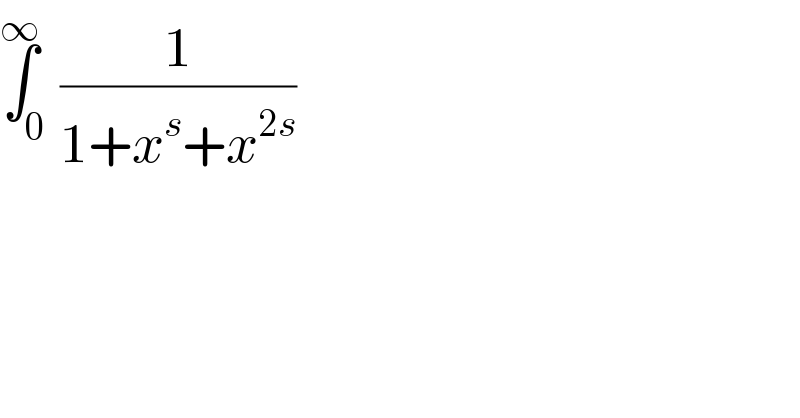
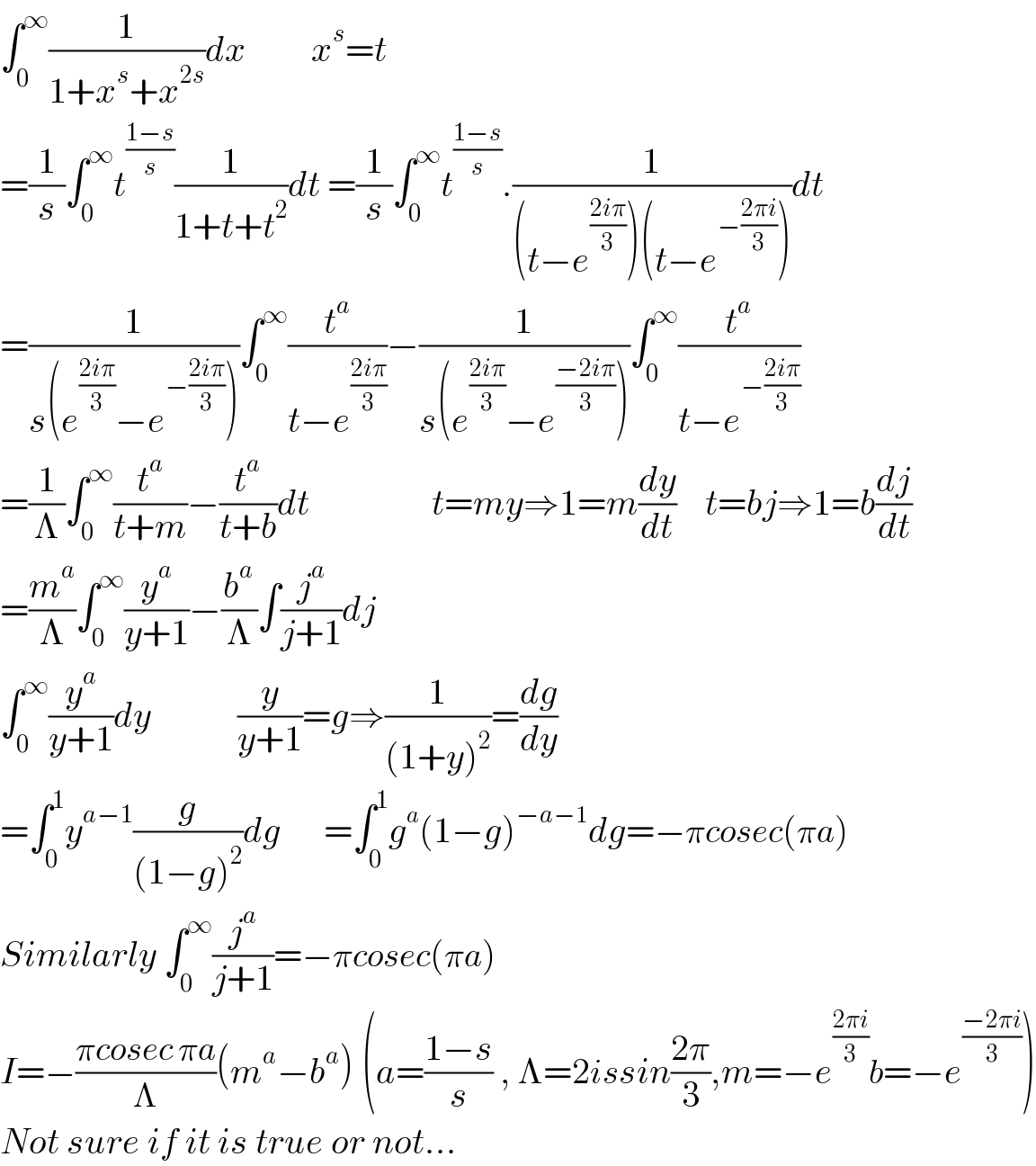
Answered by Dwaipayan Shikari last updated on 18/Dec/20
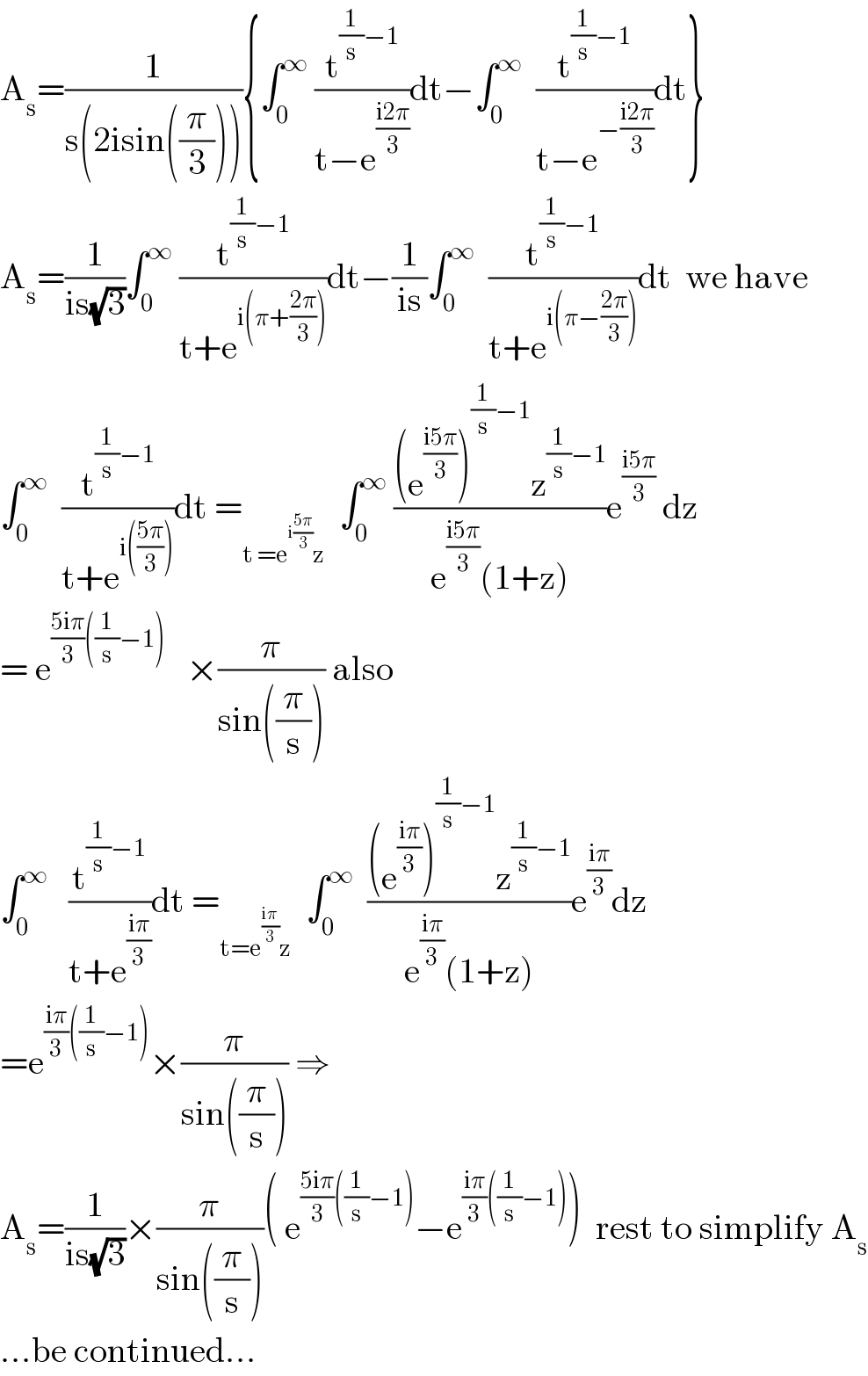
Answered by mathmax by abdo last updated on 19/Dec/20
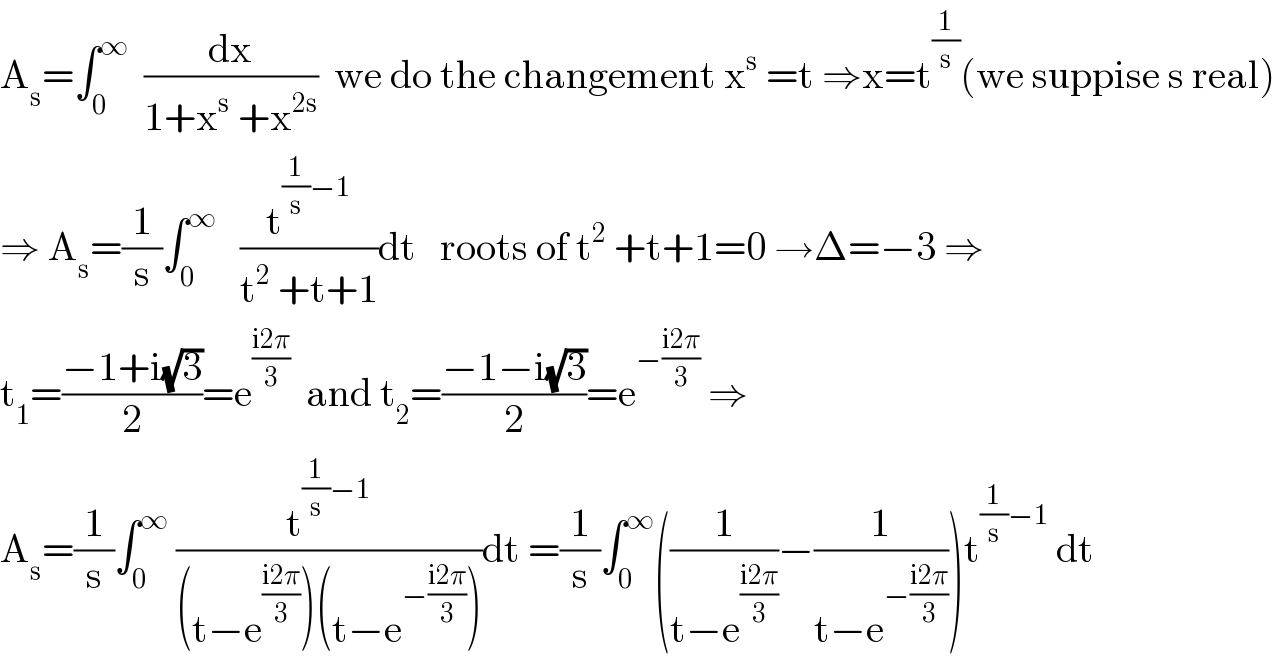
Commented by mathmax by abdo last updated on 19/Dec/20