
Question and Answers Forum

Question Number 126854 by sdfg last updated on 24/Dec/20

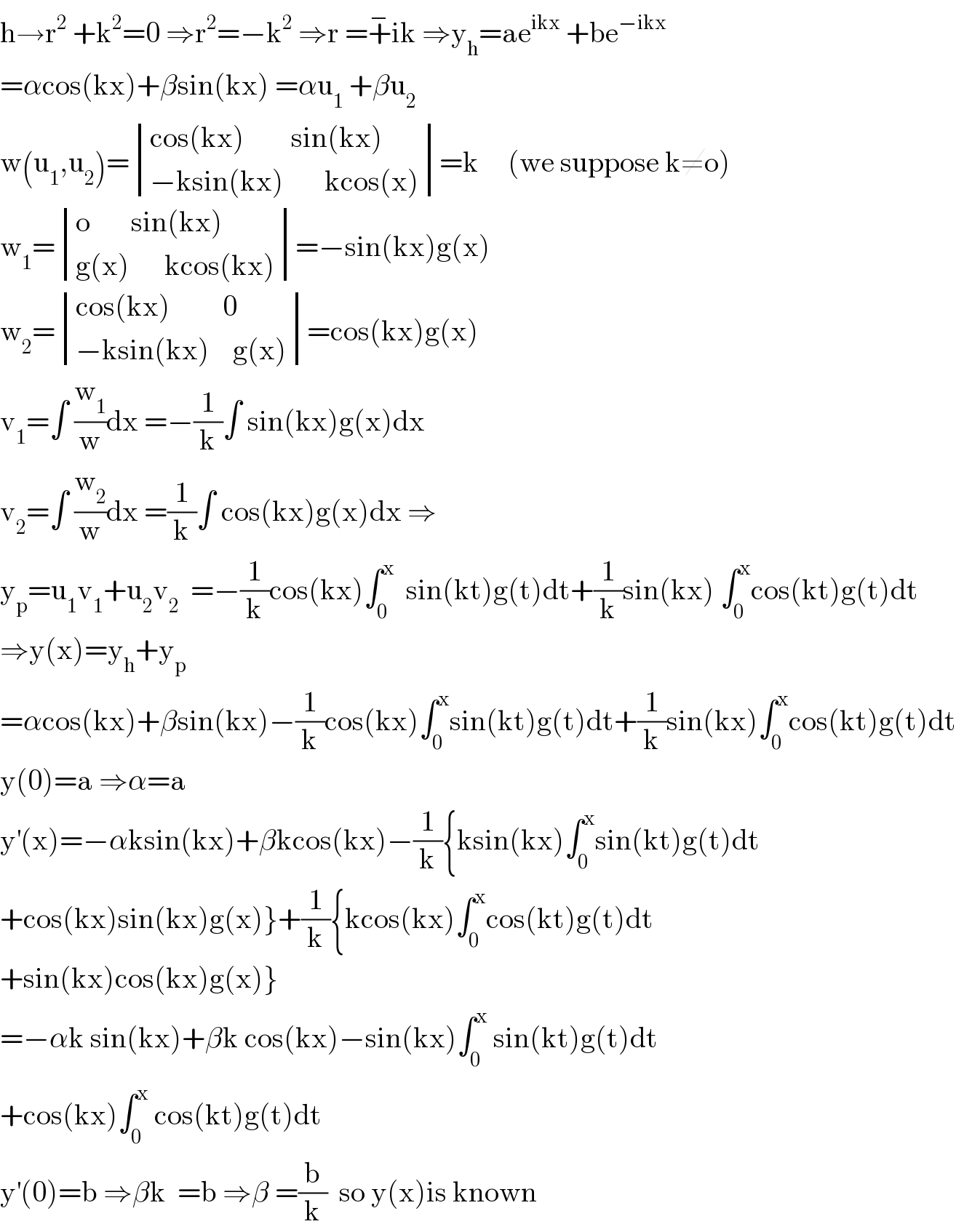
Answered by mathmax by abdo last updated on 24/Dec/20
| ||
Question and Answers Forum | ||
| ||
Question Number 126854 by sdfg last updated on 24/Dec/20 | ||
| ||
Answered by mathmax by abdo last updated on 24/Dec/20 | ||
| ||
| ||