Question and Answers Forum

Question Number 137986 by ajfour last updated on 08/Apr/21

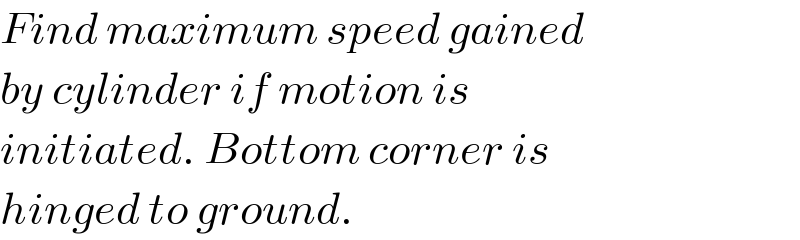
Commented by ajfour last updated on 08/Apr/21
Answered by mr W last updated on 08/Apr/21

Commented by mr W last updated on 11/Apr/21
![let ω=−(dθ/dt) sin φ=((r−(√2)r sin θ)/r)=1−(√2) sin θ s=(√2)r cos θ+r cos φ =(√2)r cos θ+r(√(1−(1−(√2) sin θ)^2 )) =(√2)r cos θ+r(√(2 sin θ((√2)−sin θ))) (ds/dθ)=−(√2)r sin θ+r((cos θ(1−(√2) sin θ))/( (√(sin θ((√2)−sin θ))))) v=(ds/dt)=−ω(ds/dθ)=ωr[(√2) sin θ−((cos θ(1−(√2) sin θ))/( (√(sin θ((√2)−sin θ)))))] I_A =((m((√2)r)^2 )/6)+mr^2 =((4mr^2 )/3) Iα=mgrsin ((π/4)−θ)+N sin φ s−N cos φ r ((4r)/(3g))α−sin ((π/2)−θ)=(N/(mg))(1−(√2) sin θ)((√2) cos θ) ⇒(N/(mg))=((((4r)/(3g))α−sin ((π/4)−θ))/( (√2)cos θ (1−(√2) sin θ))) when N=0: α=((3g)/(4r)) sin ((π/4)−θ) (1/2)I_A ω^2 +(1/2)Mv^2 =mgr[1−cos ((π/4)−θ)] ((4mr^2 )/3)ω^2 +Mω^2 r^2 [(√2) sin θ−((cos θ(1−(√2) sin θ))/( (√(sin θ((√2)−sin θ)))))]^2 =2mgr[1−cos ((π/4)−θ)] ω^2 {(4/3)+(M/m)[(√2) sin θ−((cos θ(1−(√2) sin θ))/( (√(sin θ((√2)−sin θ)))))]^2 }=((2g)/r)[1−cos ((π/4)−θ)] ω=(√(g/r))×(√((1−cos ((π/4)−θ))/((1/3)+((2M)/m)[(√2) sin θ−((cos θ(1−(√2) sin θ))/( (√(sin θ((√2)−sin θ)))))]^2 ))) with Φ(θ)=(√((1−cos ((π/4)−θ))/((1/3)+((2M)/m)[(√2) sin θ−((cos θ(1−(√2) sin θ))/( (√(sin θ((√2)−sin θ)))))]^2 ))) ⇒ω=(√(g/r))×Φ(θ) α=(dω/dt)=−ω(dω/dθ)=−(g/r)Φ(θ)Φ′(θ) −(g/r)Φ(θ)Φ′(θ)=((3g)/(4r)) sin ((π/4)−θ) ⇒Φ(θ)Φ′(θ)+(3/4) sin ((π/4)−θ)=0 v=(√(gr))×Φ(θ)[(√2) sin θ−((cos θ(1−(√2) sin θ))/( (√(sin θ((√2)−sin θ)))))] examples: (M/m)=1 we get N=0 at θ≈0.5795 (=32.20°) v_(max) ≈0.082(√(gr)) (M/m)=10 we get N=0 at θ≈0.5373 (=30.79°) v_(max) ≈0.056(√(gr))](Q138001.png)
Commented by ajfour last updated on 12/Apr/21
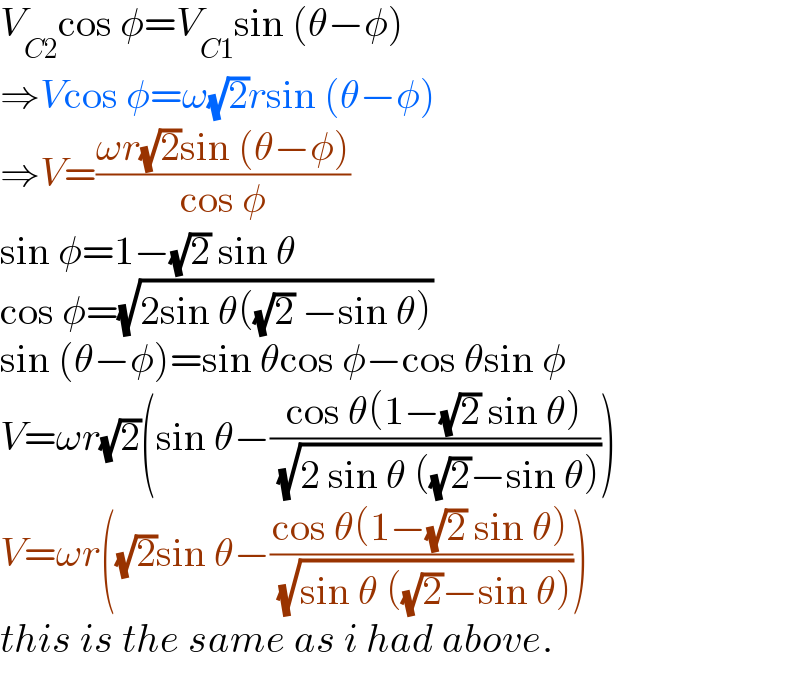
![Ncos φ=MA mgrsin (π/4−θ)−Nr(√2)sin (θ−φ) =(((4mr^2 )/3))α when contact breaks N=0, A=0, 3gsin (π/4−θ)=4αr αsin (θ−φ)=ω^2 cos (θ−φ) 3gsin (π/4−θ)sin (θ−φ)=4ω^2 rcos (θ−φ) .(i) ωr(√2)sin (θ−φ)=Vcos φ ...(ii) (1/2)(((4mr^2 )/3))ω^2 +(1/2)MV^2 =mgr[1−cos (π/4−θ)] ....(iii) 3g(cos θ−sin θ)sin (θ−φ)=4(√2)ω^2 rcos (θ−φ) ⇒ ((2/3)+((Msin^2 (θ−φ))/(mcos^2 φ)))[((3(cos θ−sin θ)sin (θ−φ))/(4cos (θ−φ)))] = (√2)−cos θ−sin θ with (√2)sin θ=1−sin φ θ is obtained from above eq. Now V=((ωr(√2)sin (θ−φ))/(cos φ)) , hence V^( 2) ={((3(cos θ−sin θ)sin^3 (θ−φ))/( 2(√2)cos^2 φcos (θ−φ)))}gr](Q138263.png)
Commented by mr W last updated on 12/Apr/21
Commented by ajfour last updated on 12/Apr/21

Commented by mr W last updated on 12/Apr/21

Commented by mr W last updated on 12/Apr/21

Commented by mr W last updated on 12/Apr/21
Commented by mr W last updated on 12/Apr/21

Commented by mr W last updated on 12/Apr/21
Commented by ajfour last updated on 12/Apr/21