
Question and Answers Forum

Question Number 147764 by puissant last updated on 23/Jul/21

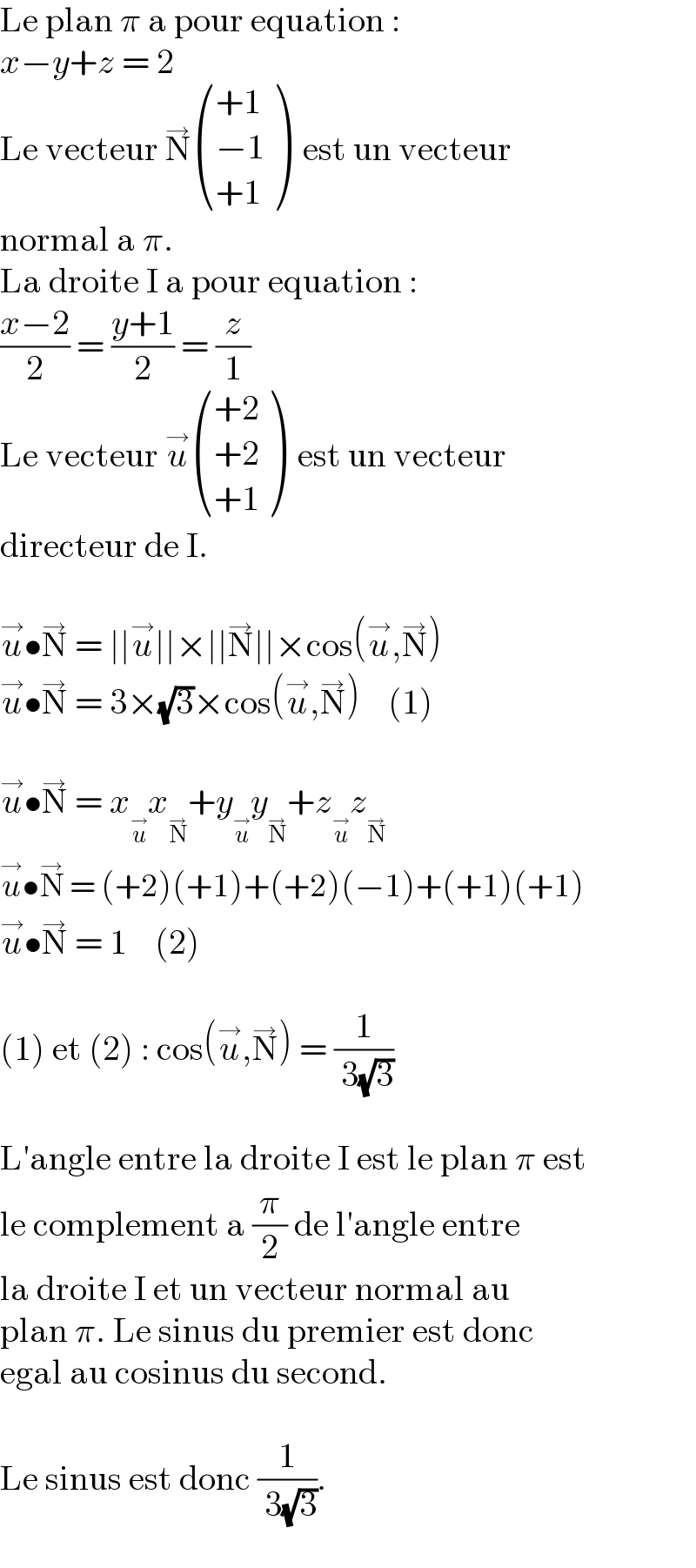
Answered by Olaf_Thorendsen last updated on 23/Jul/21
Commented by puissant last updated on 23/Jul/21

| ||
Question and Answers Forum | ||
| ||
Question Number 147764 by puissant last updated on 23/Jul/21 | ||
| ||
Answered by Olaf_Thorendsen last updated on 23/Jul/21 | ||
| ||
| ||
Commented by puissant last updated on 23/Jul/21 | ||
| ||