Question and Answers Forum

Question Number 161783 by ajfour last updated on 22/Dec/21

Commented by ajfour last updated on 22/Dec/21

Commented by ajfour last updated on 22/Dec/21
Left d job, shall hunt online..
Commented by mr W last updated on 22/Dec/21
Commented by ajfour last updated on 22/Dec/21
Commented by mr W last updated on 23/Dec/21
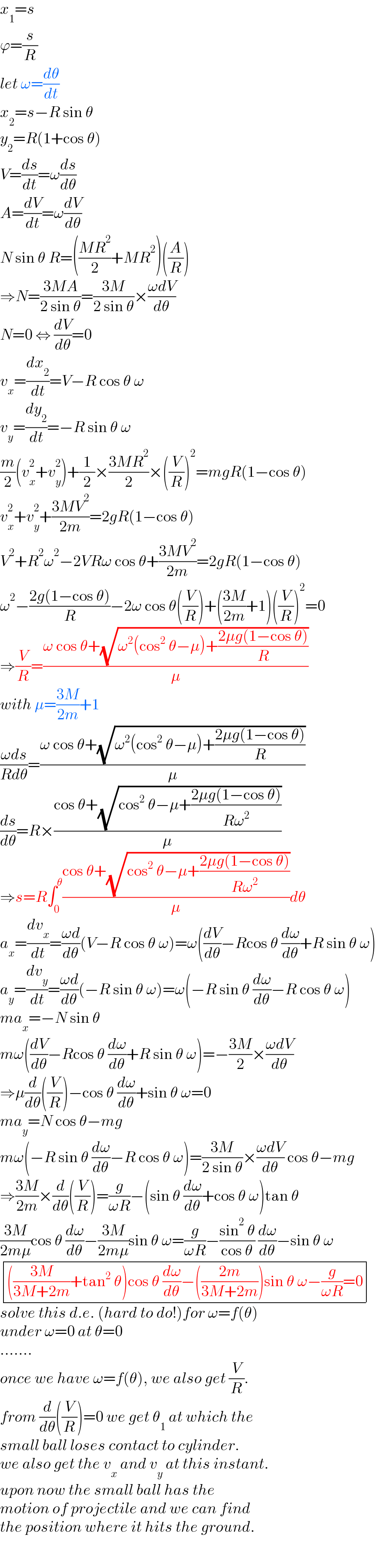
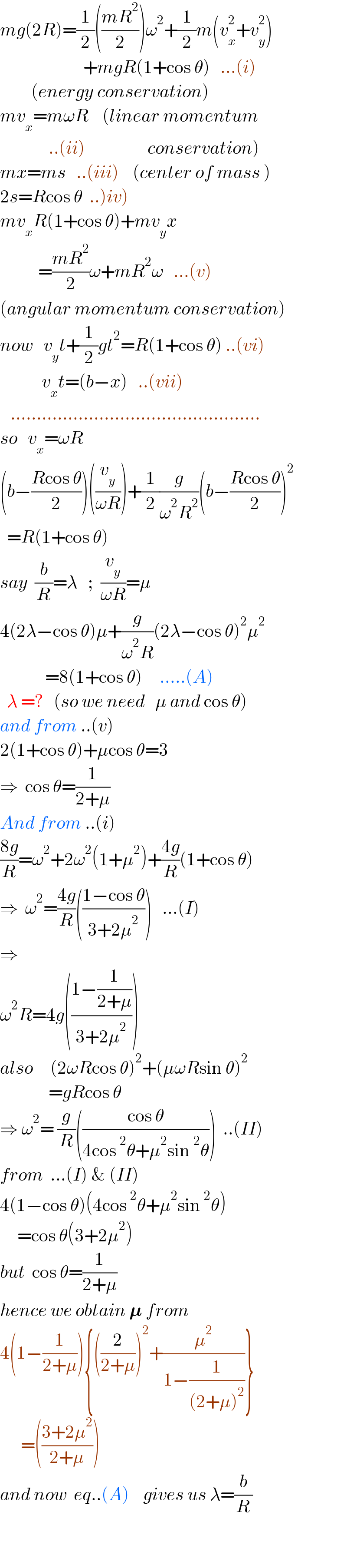
Answered by mr W last updated on 23/Dec/21

Commented by mr W last updated on 23/Dec/21
Commented by mr W last updated on 23/Dec/21
Commented by Tawa11 last updated on 23/Dec/21

Commented by ajfour last updated on 23/Dec/21
Commented by mr W last updated on 23/Dec/21
Commented by ajfour last updated on 23/Dec/21