Question and Answers Forum

Question Number 165457 by mr W last updated on 02/Feb/22
Commented by MJS_new last updated on 02/Feb/22
Commented by mr W last updated on 01/Feb/22
Commented by mr W last updated on 03/Feb/22
Commented by mr W last updated on 03/Feb/22
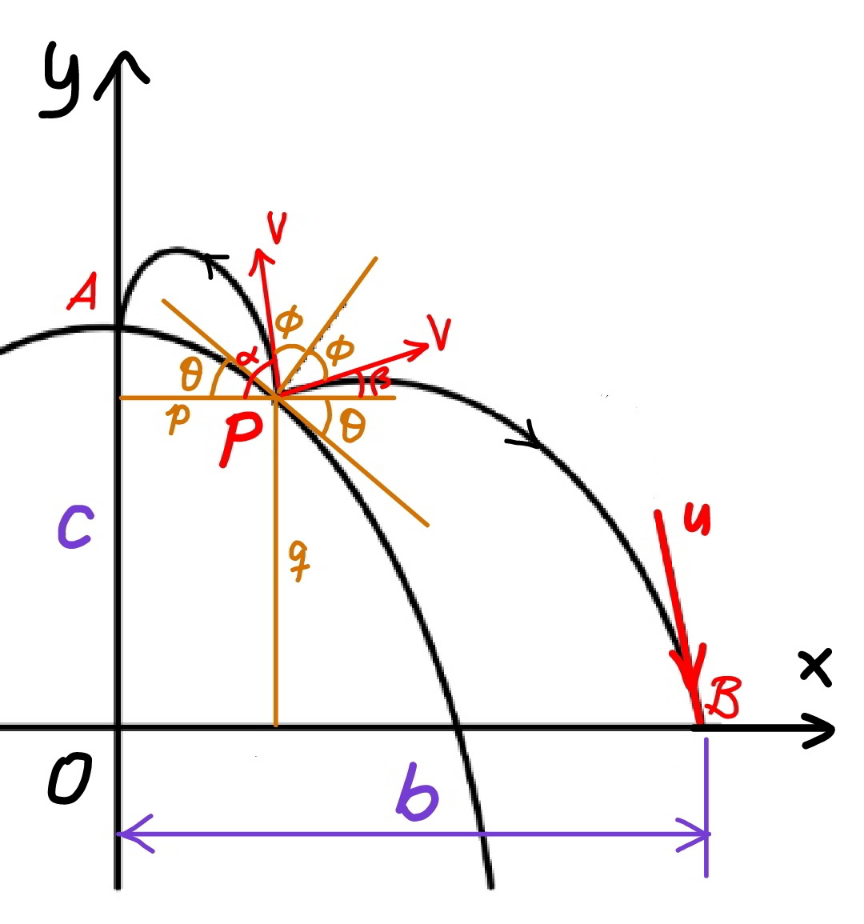
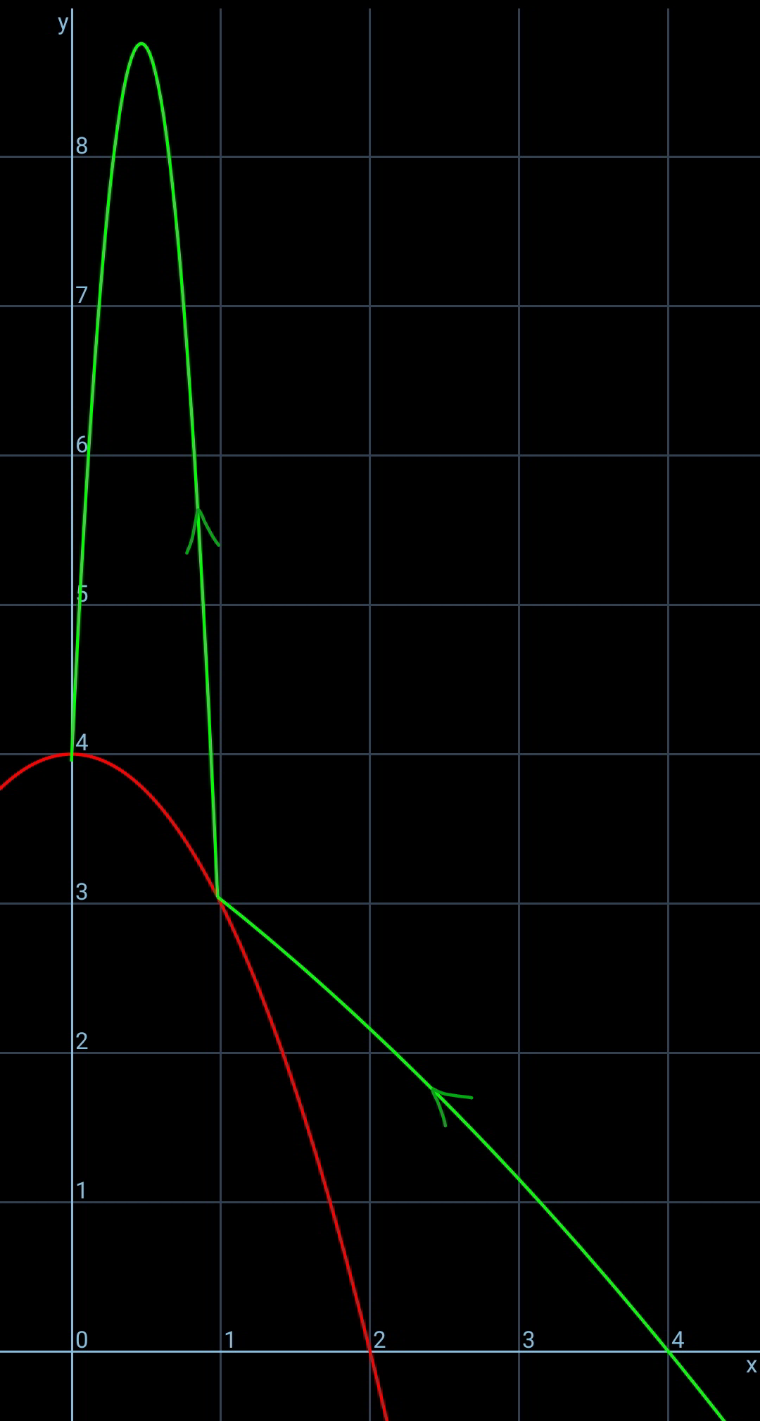
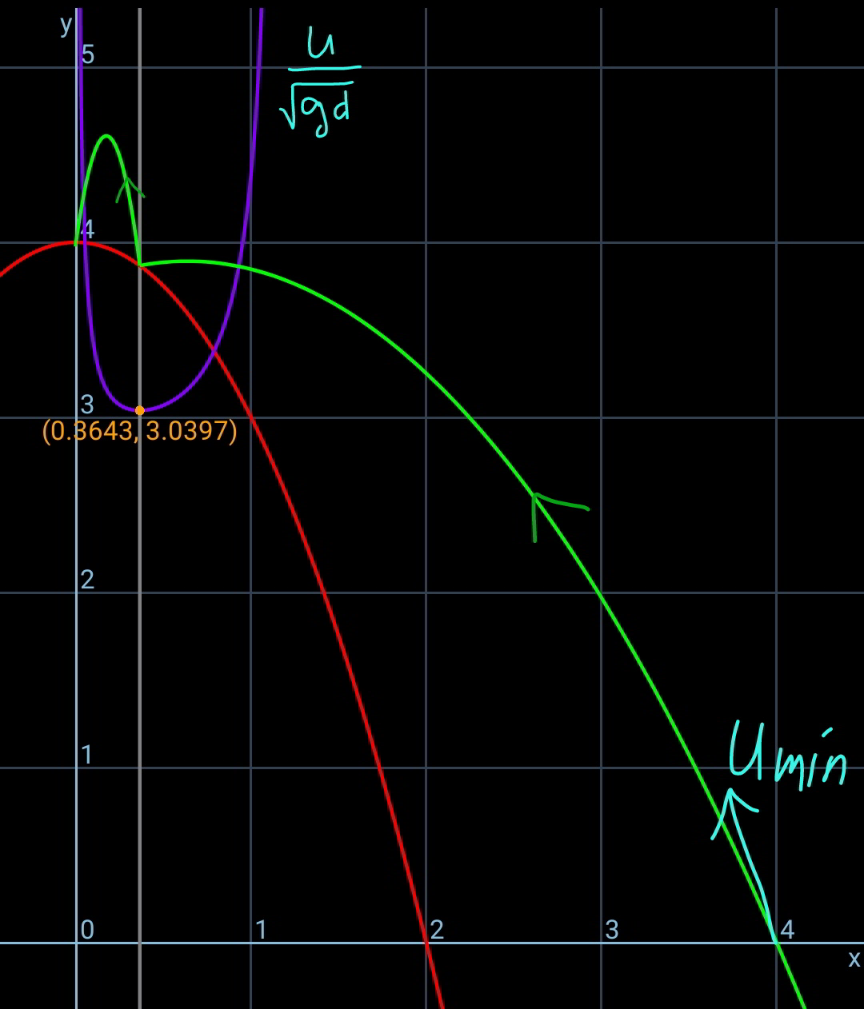
![note: projectile motion is reversible. the motion from start point A to end point B is the same as the motion from start point B to end point A, as if we just let the time run backward. that means when the ball starts from the ground at point B with a speed u and hits the hill at point P with a speed v, it is the same as when the ball starts from point P with speed v and hits the ground at point B with speed u. parabola y=c−(x^2 /d) collision atP (p, q) with q=c−(p^2 /d) tan θ=((2p)/d) α=(π/2)−φ+θ=ϕ+θ with ϕ=(π/2)−φ β=(π/2)−φ−θ=ϕ−θ motion from P to A: x=p−v cos α t y=q+v sin α t−((gt^2 )/2) A(0, c) p−v cos α t=0 t=(p/(v cos α)) q+v sin α−((gt^2 )/2)=c q+p tan α−((gp^2 (1+tan^2 α))/(2v^2 ))=c c−(p^2 /d)+p tan (ϕ+θ)−((gp^2 [1+tan^2 (ϕ+θ)])/(2v^2 ))=c let Φ=((2v^2 )/(gd)) ⇒1+((1+tan^2 (ϕ+θ))/Φ)−((d tan (ϕ+θ))/p)=0 ⇒Φ=((1+tan^2 (ϕ+θ))/((d/p) tan (ϕ+θ)−1)) motion from P to B: x=p+v cos β t y=q+v sin β t−((gt^2 )/2) B(b,0) with b=2a p+v cos β t=b t=((b−p)/(v cos β)) q+(b−p)tan β−((g(b−p)^2 (1+tan^2 β))/(2v^2 ))=0 ((cd−p^2 )/((b−p)^2 ))+(d/(b−p)) tan (ϕ−θ)−((1+tan^2 (ϕ−θ))/Φ)=0 ⇒Φ=((1+tan^2 (ϕ−θ))/(((cd−p^2 )/((b−p)^2 ))+(d/(b−p)) tan (ϕ−θ))) ((1+tan^2 (ϕ−θ))/(((cd−p^2 )/((b−p)^2 ))+(d/(b−p)) tan (ϕ−θ)))=((1+tan^2 (ϕ+θ))/((d/p) tan (ϕ+θ)−1)) let g=((cd−p^2 )/((b−p)^2 )), m=(d/(b−p)), n=(d/p) ((1+tan^2 (ϕ−θ))/(g+m tan (ϕ−θ)))=((1+tan^2 (ϕ+θ))/(n tan (ϕ+θ)−1)) ((1+(((tan ϕ−tan θ)/(1+tan ϕ tan θ)))^2 )/(g+m×((tan ϕ−tan θ)/(1+tan ϕ tan θ))))=((1+(((tan ϕ+tan θ)/(1−tan ϕ tan θ)))^2 )/(n×((tan ϕ+tan θ)/(1−tan ϕ tan θ))−1)) tan θ[(g+1)tan θ+m+n]tan^2 ϕ+[2(g−1)tan θ+(m−n)(1−tan^2 θ)]tan ϕ+g+1−(m+n)tan θ=0 with ξ=tan θ[(g+1)tan θ+m+n] ξ=((2p)/d)[(((cd−p^2 )/((b−p)^2 ))+1)((2p)/d)+(d/(b−p))+(d/p)] ξ=((4p^2 )/d^2 )(((cd−p^2 )/((b−p)^2 ))+1)+((2p)/(b−p))+2 ✓ η=2(g−1)tan θ+(m−n)(1−tan^2 θ) η=((4p)/d)(((cd−p^2 )/((b−p)^2 ))−1)+((d/(b−p))−(d/p))(1−((4p^2 )/d^2 )) ✓ λ=g+1−(m+n)tan θ λ=((cd−p^2 )/((b−p)^2 ))+1−((2p)/d)((d/(b−p))+(d/p)) λ=((cd−p^2 )/((b−p)^2 ))−((2p)/(b−p))−1 ✓ ⇒σ=tan ϕ=((−η+(√(η^2 −4ξλ)))/(2ξ)) Φ=((1+(((tan ϕ+tan θ)/(1−tan ϕ tan θ)))^2 )/(n×((tan ϕ+tan θ)/(1−tan ϕ tan θ))−1)) Φ=(((1−((2pσ)/d))^2 +(σ+((2p)/d))^2 )/([((d/p)+((2p)/d))σ+1](1−((2pσ)/d)))) Φ=(((1+σ^2 )(1+((4p^2 )/d^2 )))/([((d/p)+((2p)/d))σ+1](1−((2pσ)/d)))) ✓ we have u^2 =v^2 +2gq u^2 =v^2 +2g(c−(p^2 /d)) ((2u^2 )/(gd))=((2v^2 )/(gd))+(4/d)(c−(p^2 /d)) ((2u^2 )/(gd))=Φ−((4p^2 )/d^2 )+((4c)/d) (u/( (√(gd))))=U=(√((1/2)(Φ−((4p^2 )/d^2 )+((4c)/d)))) U=(√((1/2)(Φ−((4p^2 )/d^2 )+((4c)/d)))) from (dU/dp)=0 we get p corresponding to u_(min) and thus u_(min) . example: a=2m, d=1m, c=4m, b=4m U_(min) =3.0397 at p=0.3643 m u_(min) =9.612 m/s (see third diagram below)](Q165472.png)
Commented by mr W last updated on 02/Feb/22
Commented by mr W last updated on 02/Feb/22

Commented by mr W last updated on 03/Feb/22
Commented by MJS_new last updated on 02/Feb/22
Commented by mr W last updated on 02/Feb/22
Commented by MJS_new last updated on 02/Feb/22
Commented by MJS_new last updated on 02/Feb/22
Commented by Tawa11 last updated on 02/Feb/22

Commented by mr W last updated on 02/Feb/22
Commented by mr W last updated on 02/Feb/22
Commented by mr W last updated on 02/Feb/22
Commented by MJS_new last updated on 02/Feb/22
Commented by mr W last updated on 02/Feb/22
Commented by MJS_new last updated on 02/Feb/22
Commented by mr W last updated on 02/Feb/22

Answered by mr W last updated on 03/Feb/22
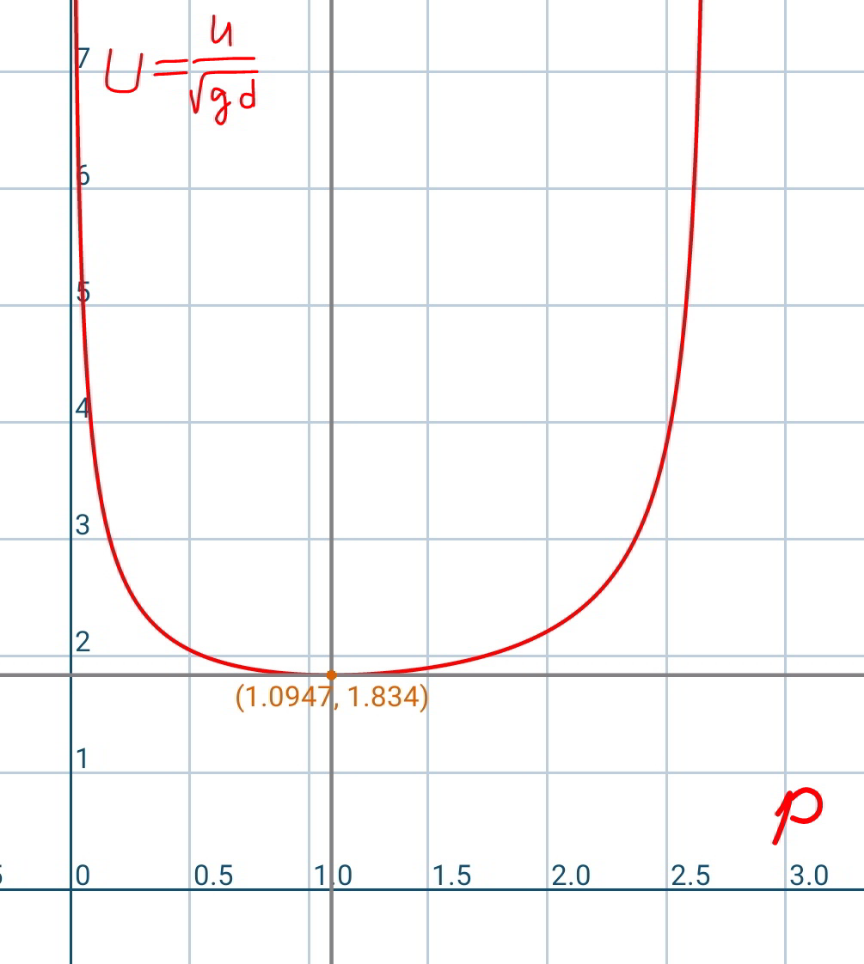
/d)))) U=(u/( (√(gd))))=(√((1/2)(Φ−((4p^2 )/d^2 )+((4c)/d)))) U is a function of parameter p. it has a minimun. from (dU/dp)=0 we find U_(min) and thus u_(min) . see following example:](Q165537.png)
Commented by mr W last updated on 03/Feb/22
Commented by mr W last updated on 03/Feb/22
Commented by ajfour last updated on 03/Feb/22
Commented by mr W last updated on 03/Feb/22