Question and Answers Forum

Question Number 177214 by mr W last updated on 02/Oct/22

Commented by mr W last updated on 02/Oct/22
Commented by mahdipoor last updated on 02/Oct/22
Commented by mr W last updated on 02/Oct/22
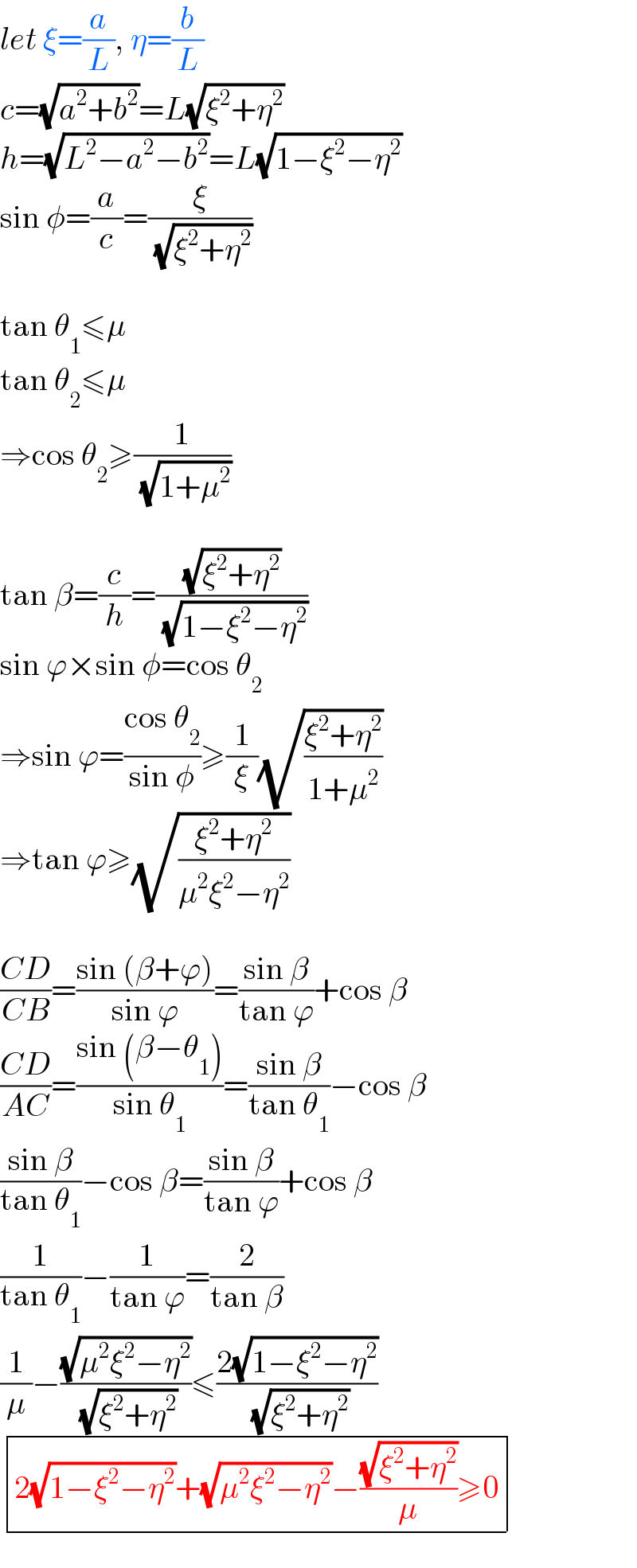
Answered by mr W last updated on 03/Oct/22

Commented by mr W last updated on 03/Oct/22

Commented by mr W last updated on 02/Oct/22

Commented by mr W last updated on 03/Oct/22
Commented by mr W last updated on 03/Oct/22

Commented by mr W last updated on 03/Oct/22

Commented by mr W last updated on 02/Oct/22

Commented by mr W last updated on 02/Oct/22

Commented by mr W last updated on 02/Oct/22

Commented by mr W last updated on 03/Oct/22

Commented by mr W last updated on 02/Oct/22

Commented by mahdipoor last updated on 02/Oct/22
Commented by mr W last updated on 03/Oct/22

Commented by mahdipoor last updated on 02/Oct/22

Commented by mahdipoor last updated on 03/Oct/22

Commented by Tawa11 last updated on 03/Oct/22

Commented by mr W last updated on 03/Oct/22
Commented by mr W last updated on 03/Oct/22

Commented by mr W last updated on 03/Oct/22

Commented by mr W last updated on 03/Oct/22

Commented by mr W last updated on 03/Oct/22

Commented by mr W last updated on 03/Oct/22
Commented by mr W last updated on 03/Oct/22

Commented by mahdipoor last updated on 04/Oct/22