
Question and Answers Forum

Question Number 18749 by Tinkutara last updated on 29/Jul/17

Commented by Tinkutara last updated on 29/Jul/17

Answered by ajfour last updated on 29/Jul/17
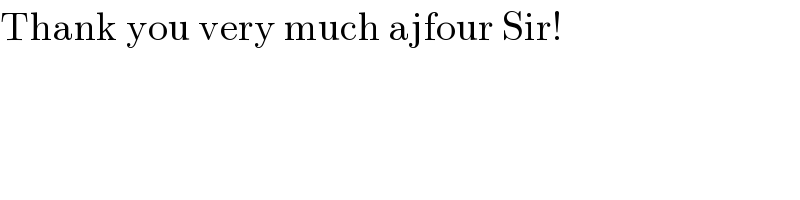
![(a)Let i^� =λr^� +μθ^� i^� =λ(cos θi^� +sin θj^� )+μ(−sin θi^� +cos θj^� ) ⇒ [ λcos θ−μsin θ=1 ]×cos θ and [ λsin θ+μcos θ=0 ]×sin θ Adding, we obtain λ=cos θ ; μ=−sin θ So, i^� =(cos θ)r^� −(sin θ)θ^� Let j^� =ρr^� +εθ^� or j^� =ρ(cos θi^� +sin θj^� )+ε(−sin θi^� +cos θj^� ) ⇒ [ ρcos θ−εsin θ=0 ]×cos θ , and [ ρsin θ+εcos θ=1 ]×sin θ Adding we get, ρ=sin θ ; ε=cos θ Hence j^� =(sin θ)r^� +(cos θ)θ^� ... .... .... ... ... ... .... .... (b) ∣r^� ∣=(√(cos^2 θ+sin^2 θ)) =1 hence a unit vector ∣θ^� ∣=(√((−sin θ)^2 +(cos θ)^2 )) =1 a unit vector. r^� .θ^� =(cos θi^� +sin θj^� ).(−sin θi^� +cos θj^� ) =−cos θsin θ+sin θcos θ =0 ⇒ r^� and θ^� are ⊥ to each other. .... .... .... ..... .... ..... .... (c) (dr^� /dt)=(d/dt)(cos θi^� +sin θj^� ) =(dθ/dt)(−sin θi^� +cos θj^� ) ⇒ (dr^� /dt)=ωθ^� . (dθ^� /dt)=(d/dt)(−sin θi^� +cos θj^� ) =(dθ/dt)(−cos θi^� −sin θj^� ) ⇒ (dθ^� /dt)=−ωr^� . .... ..... .... .... ..... .... .... (d) r^→ =αθr^� θ is dimensionless, so is unit vector r^� ; so [α]=[∣r^� ∣] =M^0 L^1 T^0 . .... .... .... .... ..... ..... .... (e) v^→ =(dr^→ /dt)=α(d/dt)(θr^� ) =α((dθ/dt)r^� +θ(dr^� /dt)) =αω(r^� +θθ^� ) . a^→ =(dv^→ /dt)=α(d/dt)(ωr^� +ωθθ^� ) =α((dω/dt)r^� +ω(dr^� /dt))+α(θ(dω/dt)θ^� +ω(dθ/dt)θ^� +ωθ(dθ^� /dt)) =α((dω/dt)r^� +ω(ωθ^� ))+α[θ(dω/dt)θ^� +ω(dθ/dt)θ^� +ωθ(−ωr^� )] a^→ =α{((dω/dt)−ω^2 θ)r^� +(2ω^2 +θ(dω/dt))θ^� } .](Q18766.png)
Commented by Tinkutara last updated on 29/Jul/17
| ||
Question and Answers Forum | ||
| ||
Question Number 18749 by Tinkutara last updated on 29/Jul/17 | ||
| ||
Commented by Tinkutara last updated on 29/Jul/17 | ||
| ||
Answered by ajfour last updated on 29/Jul/17 | ||
| ||
| ||
Commented by Tinkutara last updated on 29/Jul/17 | ||
| ||