

Question Number 23632 by ajfour last updated on 02/Nov/17

Commented by mrW1 last updated on 03/Nov/17
$$\alpha_{\mathrm{A}} =\frac{\mathrm{d}\omega_{\mathrm{A}} }{\mathrm{dt}}=\frac{\mathrm{d}\omega_{\mathrm{A}} }{\mathrm{d}\theta}×\frac{\mathrm{d}\theta}{\mathrm{dt}}=\frac{\mathrm{d}\omega_{\mathrm{A}} }{\mathrm{d}\theta}×\omega\neq\frac{\mathrm{d}\omega_{\mathrm{A}} }{\mathrm{d}\theta}×\omega_{\mathrm{A}} \\ $$
Commented by ajfour last updated on 02/Nov/17

$${If}\:{initially}\:\theta=\theta_{\mathrm{0}} \:\left({a}\:{little}\:{less}\:\right. \\ $$$${than}\:\mathrm{90}°,\:{when}\:{system}\:{was}\:{released}, \\ $$$${find}\:\theta\:{when}\:{disc}\:{A}\:{breaks}\:{contact} \\ $$$${with}\:{the}\:{wall}.\:{Friction}\:{is}\:{sufficient} \\ $$$${at}\:{wall}\:{and}\:{ground}\:{surface}\:{to}\: \\ $$$${permit}\:{pure}\:{rolling}\:{of}\:{the}\:{discs}. \\ $$
Commented by mrW1 last updated on 03/Nov/17
![(R+Lcos θ,R)=center of disc B (R,R+Lsin θ)=center of disc A (R+(L/2)cos θ,R+(L/2)sin θ)=center of rod C ω=(dθ/dt) (=ω_C ) v_A =(dy_A /dt)=Lcos θ ω u_B =(dx_B /dt)=−Lsin θ ω v_C =(L/2)cos θ ω u_C =−(L/2)sin θ ω ω_A =(v_A /R)=(L/R)cos θ ω ω_B =(u_B /R)=−(L/R)sin θ ω I_A =I_B =((MR^2 )/2) I_C =((mL^2 )/(12)) KE_A =(1/2)ML^2 cos^2 θ ω^2 +(1/2)×((MR^2 )/2)×(L^2 /R^2 )cos^2 θ ω^2 =((3ML^2 cos^2 θ)/4) ω^2 KE_B =(1/2)ML^2 sin^2 θ ω^2 +(1/2)×((MR^2 )/2)×(L^2 /R^2 )sin^2 θ ω^2 =((3ML^2 sin^2 θ)/4) ω^2 KE_C =(1/2)m(L^2 /4) ω^2 +(1/2)×((mL^2 )/(12)) ω^2 =((mL^2 )/6) ω^2 KE=(((3M)/4)+(m/6))L^2 ω^2 PE=−(M+(m/2))gL(sin θ_0 −sin θ) (((3M)/4)+(m/6))L^2 ω^2 =(M+(m/2))gL(sin θ_0 −sin θ) (9(M/m)+2)Lω^2 =(12(M/m)+6)g(sin θ_0 −sin θ) ω^2 =(g/L)×((12(M/m)+6)/(9(M/m)+2))×(sin θ_0 −sin θ) with a^2 =(g/L)×((12(M/m)+6)/(9(M/m)+2)), b=sin θ_0 ω^2 =a^2 (b−sin θ) ⇒ω=a(√(b−sin θ)) ω_A =(L/R)cos θ ω=((aL)/R)cos θ(√(b−sin θ)) α_A =ω(dω_A /dθ)=((a^2 L)/R)(√(b−sin θ))×[−sin θ(√(b−sin θ))−cos θ((cos θ)/(2(√(b−sin θ))))] α_A =((a^2 L)/(2R))×[3sin^2 θ−2bsin θ−1] when the contact with wall breaks, I_A α_A =0 ⇒3sin^2 θ−2bsin θ−1=0 ⇒sin θ=((b+(√(b^2 +3)))/3)=((sin θ_0 +(√(sin^2 θ_0 +3)))/3) ⇒θ=sin^(−1) [((sin θ_0 +(√(sin^2 θ_0 +3)))/3)]>θ_0 ...but θ should < θ_0 , so something is wrong .... ... or the contact will not break! ....](Q23638.png)
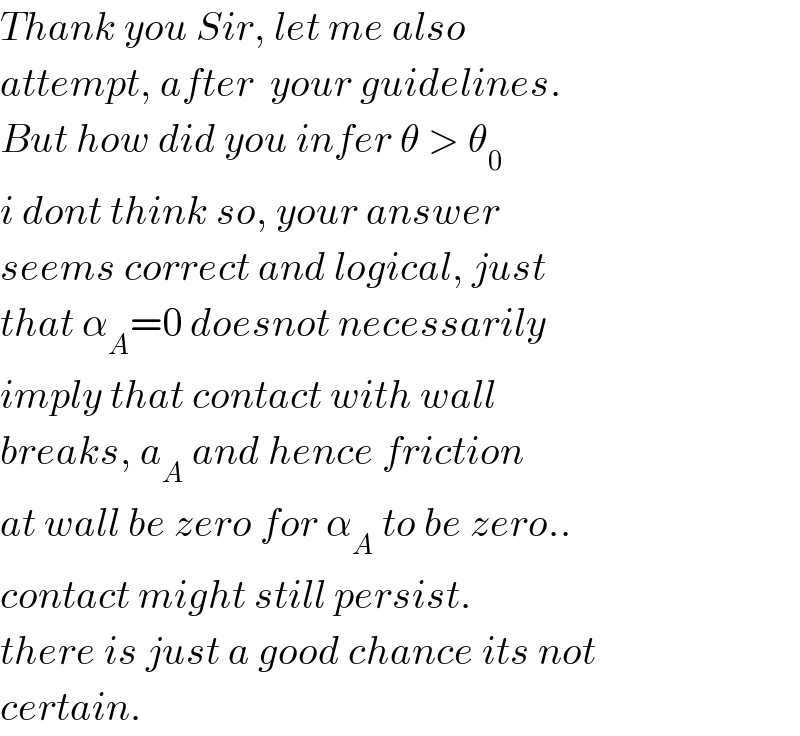
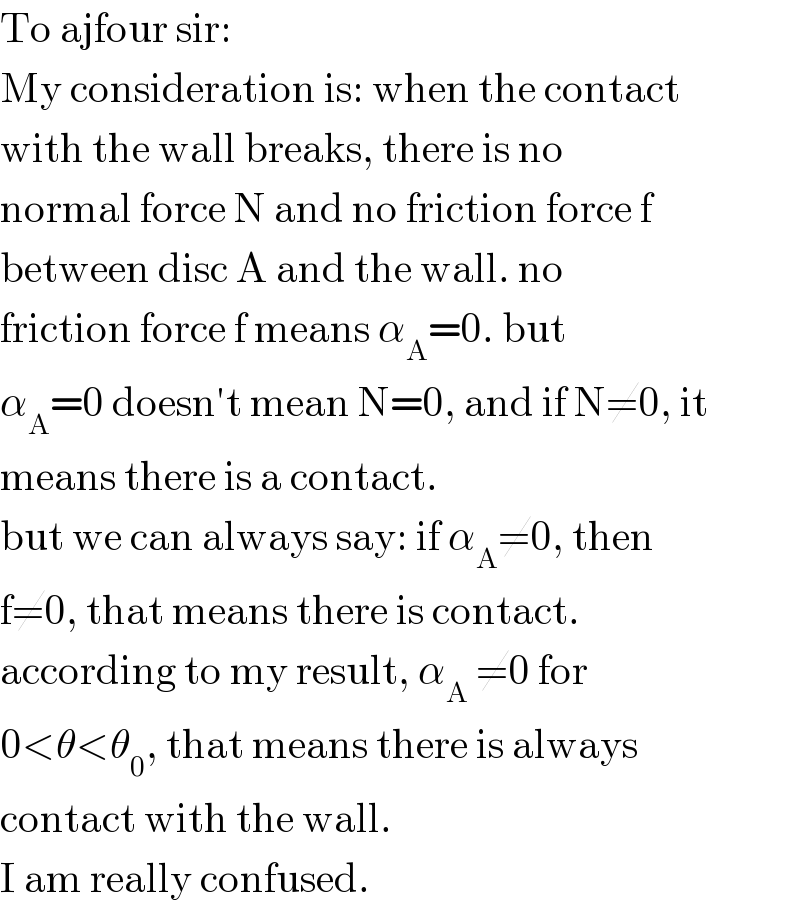
$$\left(\mathrm{R}+\mathrm{Lcos}\:\theta,\mathrm{R}\right)=\mathrm{center}\:\mathrm{of}\:\mathrm{disc}\:\mathrm{B} \\ $$$$\left(\mathrm{R},\mathrm{R}+\mathrm{Lsin}\:\theta\right)=\mathrm{center}\:\mathrm{of}\:\mathrm{disc}\:\mathrm{A} \\ $$$$\left(\mathrm{R}+\frac{\mathrm{L}}{\mathrm{2}}\mathrm{cos}\:\theta,\mathrm{R}+\frac{\mathrm{L}}{\mathrm{2}}\mathrm{sin}\:\theta\right)=\mathrm{center}\:\mathrm{of}\:\mathrm{rod}\:\mathrm{C} \\ $$$$\omega=\frac{\mathrm{d}\theta}{\mathrm{dt}}\:\left(=\omega_{\mathrm{C}} \right) \\ $$$$\mathrm{v}_{\mathrm{A}} =\frac{\mathrm{dy}_{\mathrm{A}} }{\mathrm{dt}}=\mathrm{Lcos}\:\theta\:\omega \\ $$$$\mathrm{u}_{\mathrm{B}} =\frac{\mathrm{dx}_{\mathrm{B}} }{\mathrm{dt}}=−\mathrm{Lsin}\:\theta\:\omega \\ $$$$\mathrm{v}_{\mathrm{C}} =\frac{\mathrm{L}}{\mathrm{2}}\mathrm{cos}\:\theta\:\omega \\ $$$$\mathrm{u}_{\mathrm{C}} =−\frac{\mathrm{L}}{\mathrm{2}}\mathrm{sin}\:\theta\:\omega \\ $$$$\omega_{\mathrm{A}} =\frac{\mathrm{v}_{\mathrm{A}} }{\mathrm{R}}=\frac{\mathrm{L}}{\mathrm{R}}\mathrm{cos}\:\theta\:\omega \\ $$$$\omega_{\mathrm{B}} =\frac{\mathrm{u}_{\mathrm{B}} }{\mathrm{R}}=−\frac{\mathrm{L}}{\mathrm{R}}\mathrm{sin}\:\theta\:\omega \\ $$$$\mathrm{I}_{\mathrm{A}} =\mathrm{I}_{\mathrm{B}} =\frac{\mathrm{MR}^{\mathrm{2}} }{\mathrm{2}} \\ $$$$\mathrm{I}_{\mathrm{C}} =\frac{\mathrm{mL}^{\mathrm{2}} }{\mathrm{12}} \\ $$$$\mathrm{KE}_{\mathrm{A}} =\frac{\mathrm{1}}{\mathrm{2}}\mathrm{ML}^{\mathrm{2}} \mathrm{cos}^{\mathrm{2}} \:\theta\:\omega^{\mathrm{2}} +\frac{\mathrm{1}}{\mathrm{2}}×\frac{\mathrm{MR}^{\mathrm{2}} }{\mathrm{2}}×\frac{\mathrm{L}^{\mathrm{2}} }{\mathrm{R}^{\mathrm{2}} }\mathrm{cos}^{\mathrm{2}} \:\theta\:\omega^{\mathrm{2}} =\frac{\mathrm{3ML}^{\mathrm{2}} \mathrm{cos}^{\mathrm{2}} \:\theta}{\mathrm{4}}\:\omega^{\mathrm{2}} \\ $$$$\mathrm{KE}_{\mathrm{B}} =\frac{\mathrm{1}}{\mathrm{2}}\mathrm{ML}^{\mathrm{2}} \mathrm{sin}^{\mathrm{2}} \:\theta\:\omega^{\mathrm{2}} +\frac{\mathrm{1}}{\mathrm{2}}×\frac{\mathrm{MR}^{\mathrm{2}} }{\mathrm{2}}×\frac{\mathrm{L}^{\mathrm{2}} }{\mathrm{R}^{\mathrm{2}} }\mathrm{sin}^{\mathrm{2}} \:\theta\:\omega^{\mathrm{2}} =\frac{\mathrm{3ML}^{\mathrm{2}} \mathrm{sin}^{\mathrm{2}} \:\theta}{\mathrm{4}}\:\omega^{\mathrm{2}} \\ $$$$\mathrm{KE}_{\mathrm{C}} =\frac{\mathrm{1}}{\mathrm{2}}\mathrm{m}\frac{\mathrm{L}^{\mathrm{2}} }{\mathrm{4}}\:\omega^{\mathrm{2}} +\frac{\mathrm{1}}{\mathrm{2}}×\frac{\mathrm{mL}^{\mathrm{2}} }{\mathrm{12}}\:\omega^{\mathrm{2}} =\frac{\mathrm{mL}^{\mathrm{2}} }{\mathrm{6}}\:\omega^{\mathrm{2}} \\ $$$$\mathrm{KE}=\left(\frac{\mathrm{3M}}{\mathrm{4}}+\frac{\mathrm{m}}{\mathrm{6}}\right)\mathrm{L}^{\mathrm{2}} \omega^{\mathrm{2}} \\ $$$$\mathrm{PE}=−\left(\mathrm{M}+\frac{\mathrm{m}}{\mathrm{2}}\right)\mathrm{gL}\left(\mathrm{sin}\:\theta_{\mathrm{0}} −\mathrm{sin}\:\theta\right) \\ $$$$\left(\frac{\mathrm{3M}}{\mathrm{4}}+\frac{\mathrm{m}}{\mathrm{6}}\right)\mathrm{L}^{\mathrm{2}} \omega^{\mathrm{2}} =\left(\mathrm{M}+\frac{\mathrm{m}}{\mathrm{2}}\right)\mathrm{gL}\left(\mathrm{sin}\:\theta_{\mathrm{0}} −\mathrm{sin}\:\theta\right) \\ $$$$\left(\mathrm{9}\frac{\mathrm{M}}{\mathrm{m}}+\mathrm{2}\right)\mathrm{L}\omega^{\mathrm{2}} =\left(\mathrm{12}\frac{\mathrm{M}}{\mathrm{m}}+\mathrm{6}\right)\mathrm{g}\left(\mathrm{sin}\:\theta_{\mathrm{0}} −\mathrm{sin}\:\theta\right) \\ $$$$\omega^{\mathrm{2}} =\frac{\mathrm{g}}{\mathrm{L}}×\frac{\mathrm{12}\frac{\mathrm{M}}{\mathrm{m}}+\mathrm{6}}{\mathrm{9}\frac{\mathrm{M}}{\mathrm{m}}+\mathrm{2}}×\left(\mathrm{sin}\:\theta_{\mathrm{0}} −\mathrm{sin}\:\theta\right) \\ $$$$\mathrm{with}\:\mathrm{a}^{\mathrm{2}} =\frac{\mathrm{g}}{\mathrm{L}}×\frac{\mathrm{12}\frac{\mathrm{M}}{\mathrm{m}}+\mathrm{6}}{\mathrm{9}\frac{\mathrm{M}}{\mathrm{m}}+\mathrm{2}},\:\mathrm{b}=\mathrm{sin}\:\theta_{\mathrm{0}} \\ $$$$\omega^{\mathrm{2}} =\mathrm{a}^{\mathrm{2}} \left(\mathrm{b}−\mathrm{sin}\:\theta\right) \\ $$$$\Rightarrow\omega=\mathrm{a}\sqrt{\mathrm{b}−\mathrm{sin}\:\theta} \\ $$$$\omega_{\mathrm{A}} =\frac{\mathrm{L}}{\mathrm{R}}\mathrm{cos}\:\theta\:\omega=\frac{\mathrm{aL}}{\mathrm{R}}\mathrm{cos}\:\theta\sqrt{\mathrm{b}−\mathrm{sin}\:\theta} \\ $$$$\alpha_{\mathrm{A}} =\omega\frac{\mathrm{d}\omega_{\mathrm{A}} }{\mathrm{d}\theta}=\frac{\mathrm{a}^{\mathrm{2}} \mathrm{L}}{\mathrm{R}}\sqrt{\mathrm{b}−\mathrm{sin}\:\theta}×\left[−\mathrm{sin}\:\theta\sqrt{\mathrm{b}−\mathrm{sin}\:\theta}−\mathrm{cos}\:\theta\frac{\mathrm{cos}\:\theta}{\mathrm{2}\sqrt{\mathrm{b}−\mathrm{sin}\:\theta}}\right] \\ $$$$\alpha_{\mathrm{A}} =\frac{\mathrm{a}^{\mathrm{2}} \mathrm{L}}{\mathrm{2R}}×\left[\mathrm{3sin}^{\mathrm{2}} \:\theta−\mathrm{2bsin}\:\theta−\mathrm{1}\right] \\ $$$$\mathrm{when}\:\mathrm{the}\:\mathrm{contact}\:\mathrm{with}\:\mathrm{wall}\:\mathrm{breaks}, \\ $$$$\mathrm{I}_{\mathrm{A}} \alpha_{\mathrm{A}} =\mathrm{0} \\ $$$$\Rightarrow\mathrm{3sin}^{\mathrm{2}} \:\theta−\mathrm{2bsin}\:\theta−\mathrm{1}=\mathrm{0} \\ $$$$\Rightarrow\mathrm{sin}\:\theta=\frac{\mathrm{b}+\sqrt{\mathrm{b}^{\mathrm{2}} +\mathrm{3}}}{\mathrm{3}}=\frac{\mathrm{sin}\:\theta_{\mathrm{0}} +\sqrt{\mathrm{sin}^{\mathrm{2}} \:\theta_{\mathrm{0}} +\mathrm{3}}}{\mathrm{3}} \\ $$$$\Rightarrow\theta=\mathrm{sin}^{−\mathrm{1}} \left[\frac{\mathrm{sin}\:\theta_{\mathrm{0}} +\sqrt{\mathrm{sin}^{\mathrm{2}} \:\theta_{\mathrm{0}} +\mathrm{3}}}{\mathrm{3}}\right]>\theta_{\mathrm{0}} \\ $$$$ \\ $$$$...\mathrm{but}\:\theta\:\mathrm{should}\:<\:\theta_{\mathrm{0}} ,\:\mathrm{so}\:\mathrm{something}\:\mathrm{is}\:\mathrm{wrong}\:.... \\ $$$$...\:\mathrm{or}\:\mathrm{the}\:\mathrm{contact}\:\mathrm{will}\:\mathrm{not}\:\mathrm{break}!\:.... \\ $$
Commented by ajfour last updated on 03/Nov/17
$${Thank}\:{you}\:{Sir},\:{let}\:{me}\:{also} \\ $$$${attempt},\:{after}\:\:{your}\:{guidelines}. \\ $$$${But}\:{how}\:{did}\:{you}\:{infer}\:\theta\:>\:\theta_{\mathrm{0}} \\ $$$${i}\:{dont}\:{think}\:{so},\:{your}\:{answer} \\ $$$${seems}\:{correct}\:{and}\:{logical},\:{just} \\ $$$${that}\:\alpha_{{A}} =\mathrm{0}\:{doesnot}\:{necessarily} \\ $$$${imply}\:{that}\:{contact}\:{with}\:{wall} \\ $$$${breaks},\:{a}_{{A}} \:{and}\:{hence}\:{friction} \\ $$$${at}\:{wall}\:{be}\:{zero}\:{for}\:\alpha_{{A}} \:{to}\:{be}\:{zero}.. \\ $$$${contact}\:{might}\:{still}\:{persist}. \\ $$$${there}\:{is}\:{just}\:{a}\:{good}\:{chance}\:{its}\:{not} \\ $$$${certain}. \\ $$
Commented by ajfour last updated on 03/Nov/17
$$\alpha_{{A}} =\frac{{d}\omega_{{A}} }{{dt}}=\frac{{a}_{{A}} }{{R}}=\frac{\mathrm{1}}{{R}}\frac{{dv}_{{A}} }{{dt}} \\ $$$$\:\:\:\:\:=\frac{\mathrm{1}}{{R}}\frac{{d}}{{dt}}\left(\omega{L}\mathrm{cos}\:\theta\right) \\ $$$$\:\:\:\:=\frac{{L}}{{R}}\left(−\omega^{\mathrm{2}} \mathrm{sin}\:\theta+\alpha\mathrm{cos}\:\theta\right) \\ $$$$\:{how}\:{can}\:{you}\:{write}\:\alpha_{{A}} =\omega\frac{{d}\omega_{{A}} }{{d}\theta} \\ $$$$\alpha_{{A}} \:\neq\:\omega_{{A}} \frac{{d}\omega_{{A}} }{{d}\theta}\:\:,\:{even}.\:\:{It}\:{has}\:{to}\:{do} \\ $$$${with}\:{angle}\:{turned}\:{by}\:{disc}\:{A},\:{Sir}! \\ $$
Commented by mrW1 last updated on 03/Nov/17
$$\mathrm{why}\:\mathrm{I}\:\mathrm{said}\:\theta>\theta_{\mathrm{0}} : \\ $$$$\mathrm{sin}\:\theta=\frac{\mathrm{b}+\sqrt{\mathrm{b}^{\mathrm{2}} +\mathrm{3}}}{\mathrm{3}}\:\mathrm{with}\:\mathrm{b}=\mathrm{sin}\:\theta_{\mathrm{0}} <\mathrm{1} \\ $$$$\mathrm{sin}\:\theta=\frac{\mathrm{b}+\sqrt{\mathrm{b}^{\mathrm{2}} +\mathrm{3}}}{\mathrm{3}}>\frac{\mathrm{b}+\sqrt{\mathrm{b}^{\mathrm{2}} +\mathrm{3b}^{\mathrm{2}} }}{\mathrm{3}}=\frac{\mathrm{b}+\mathrm{2b}}{\mathrm{3}}=\mathrm{b} \\ $$$$\Rightarrow\mathrm{sin}\:\theta>\mathrm{sin}\:\theta_{\mathrm{0}} \\ $$$$\Rightarrow\theta>\theta_{\mathrm{0}} \\ $$
Commented by mrW1 last updated on 03/Nov/17
$$\mathrm{To}\:\mathrm{ajfour}\:\mathrm{sir}: \\ $$$$\mathrm{My}\:\mathrm{consideration}\:\mathrm{is}:\:\mathrm{when}\:\mathrm{the}\:\mathrm{contact} \\ $$$$\mathrm{with}\:\mathrm{the}\:\mathrm{wall}\:\mathrm{breaks},\:\mathrm{there}\:\mathrm{is}\:\mathrm{no}\: \\ $$$$\mathrm{normal}\:\mathrm{force}\:\mathrm{N}\:\mathrm{and}\:\mathrm{no}\:\mathrm{friction}\:\mathrm{force}\:\mathrm{f} \\ $$$$\mathrm{between}\:\mathrm{disc}\:\mathrm{A}\:\mathrm{and}\:\mathrm{the}\:\mathrm{wall}.\:\mathrm{no} \\ $$$$\mathrm{friction}\:\mathrm{force}\:\mathrm{f}\:\mathrm{means}\:\alpha_{\mathrm{A}} =\mathrm{0}.\:\mathrm{but} \\ $$$$\alpha_{\mathrm{A}} =\mathrm{0}\:\mathrm{doesn}'\mathrm{t}\:\mathrm{mean}\:\mathrm{N}=\mathrm{0},\:\mathrm{and}\:\mathrm{if}\:\mathrm{N}\neq\mathrm{0},\:\mathrm{it} \\ $$$$\mathrm{means}\:\mathrm{there}\:\mathrm{is}\:\mathrm{a}\:\mathrm{contact}. \\ $$$$\mathrm{but}\:\mathrm{we}\:\mathrm{can}\:\mathrm{always}\:\mathrm{say}:\:\mathrm{if}\:\alpha_{\mathrm{A}} \neq\mathrm{0},\:\mathrm{then} \\ $$$$\mathrm{f}\neq\mathrm{0},\:\mathrm{that}\:\mathrm{means}\:\mathrm{there}\:\mathrm{is}\:\mathrm{contact}. \\ $$$$\mathrm{according}\:\mathrm{to}\:\mathrm{my}\:\mathrm{result},\:\alpha_{\mathrm{A}} \:\neq\mathrm{0}\:\mathrm{for} \\ $$$$\mathrm{0}<\theta<\theta_{\mathrm{0}} ,\:\mathrm{that}\:\mathrm{means}\:\mathrm{there}\:\mathrm{is}\:\mathrm{always} \\ $$$$\mathrm{contact}\:\mathrm{with}\:\mathrm{the}\:\mathrm{wall}. \\ $$$$\mathrm{I}\:\mathrm{am}\:\mathrm{really}\:\mathrm{confused}. \\ $$
Commented by mrW1 last updated on 03/Nov/17
![ω=a(√(b−sin θ)) α=(dω/dt)=ω(dω/dθ)=a^2 (√(b−sin θ))×((−cos θ)/(2(√(b−sin θ))))=−((a^2 cos θ)/2) α_A =....=(dω_A /dt)=(L/R)(−ω^2 sin θ+αcos θ) =(L/R)[−a^2 (b−sin θ)sin θ−((a^2 cos^2 θ)/2)] =((a^2 L)/(2R))[3sin^2 θ−2bsin θ−1] this is the same as I got.](Q23662.png)
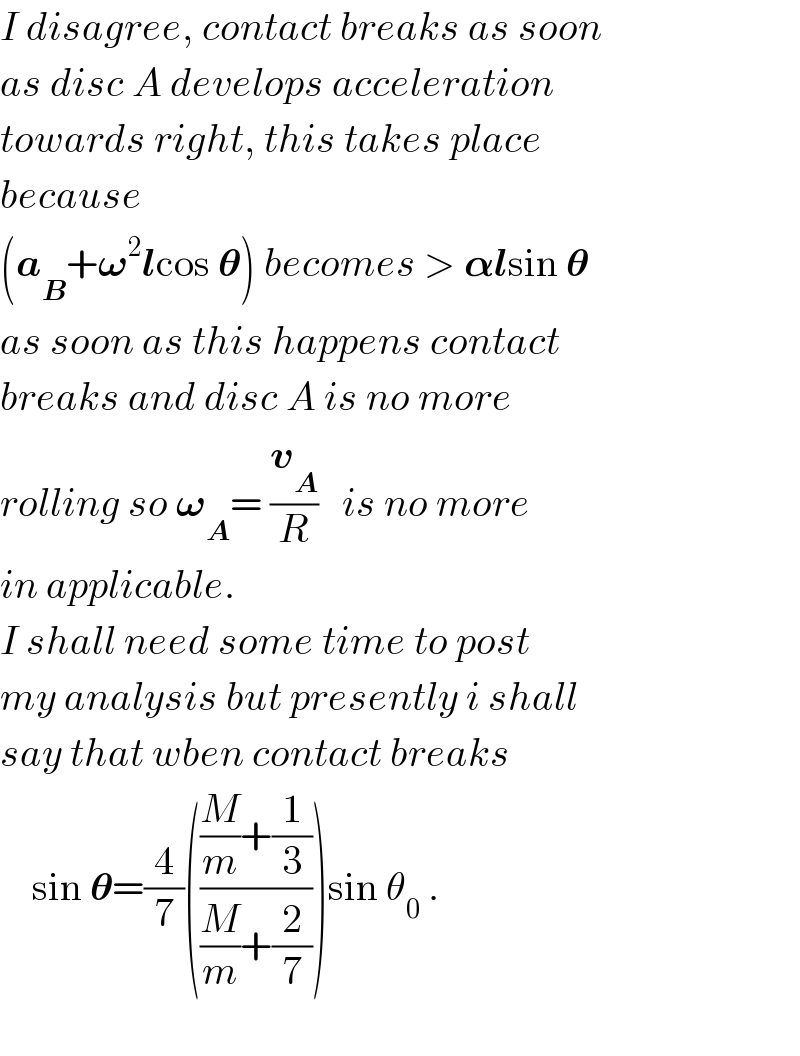
$$\omega=\mathrm{a}\sqrt{\mathrm{b}−\mathrm{sin}\:\theta} \\ $$$$\alpha=\frac{\mathrm{d}\omega}{\mathrm{dt}}=\omega\frac{\mathrm{d}\omega}{\mathrm{d}\theta}=\mathrm{a}^{\mathrm{2}} \sqrt{\mathrm{b}−\mathrm{sin}\:\theta}×\frac{−\mathrm{cos}\:\theta}{\mathrm{2}\sqrt{\mathrm{b}−\mathrm{sin}\:\theta}}=−\frac{\mathrm{a}^{\mathrm{2}} \mathrm{cos}\:\theta}{\mathrm{2}} \\ $$$$\alpha_{\mathrm{A}} =....=\frac{\mathrm{d}\omega_{\mathrm{A}} }{\mathrm{dt}}=\frac{{L}}{{R}}\left(−\omega^{\mathrm{2}} \mathrm{sin}\:\theta+\alpha\mathrm{cos}\:\theta\right) \\ $$$$=\frac{\mathrm{L}}{\mathrm{R}}\left[−\mathrm{a}^{\mathrm{2}} \left(\mathrm{b}−\mathrm{sin}\:\theta\right)\mathrm{sin}\:\theta−\frac{\mathrm{a}^{\mathrm{2}} \mathrm{cos}^{\mathrm{2}} \:\theta}{\mathrm{2}}\right] \\ $$$$=\frac{\mathrm{a}^{\mathrm{2}} \mathrm{L}}{\mathrm{2R}}\left[\mathrm{3sin}^{\mathrm{2}} \:\theta−\mathrm{2bsin}\:\theta−\mathrm{1}\right] \\ $$$$\mathrm{this}\:\mathrm{is}\:\mathrm{the}\:\mathrm{same}\:\mathrm{as}\:\mathrm{I}\:\mathrm{got}. \\ $$
Commented by ajfour last updated on 03/Nov/17
$${I}\:{disagree},\:{contact}\:{breaks}\:{as}\:{soon} \\ $$$${as}\:{disc}\:{A}\:{develops}\:{acceleration} \\ $$$${towards}\:{right},\:{this}\:{takes}\:{place} \\ $$$${because}\: \\ $$$$\left(\boldsymbol{{a}}_{\boldsymbol{{B}}} +\boldsymbol{\omega}^{\mathrm{2}} \boldsymbol{{l}}\mathrm{cos}\:\boldsymbol{\theta}\right)\:{becomes}\:>\:\boldsymbol{\alpha{l}}\mathrm{sin}\:\boldsymbol{\theta} \\ $$$${as}\:{soon}\:{as}\:{this}\:{happens}\:{contact} \\ $$$${breaks}\:{and}\:{disc}\:{A}\:{is}\:{no}\:{more} \\ $$$${rolling}\:{so}\:\boldsymbol{\omega}_{\boldsymbol{{A}}} =\:\frac{\boldsymbol{{v}}_{\boldsymbol{{A}}} }{{R}}\:\:\:{is}\:{no}\:{more} \\ $$$${in}\:{applicable}. \\ $$$${I}\:{shall}\:{need}\:{some}\:{time}\:{to}\:{post} \\ $$$${my}\:{analysis}\:{but}\:{presently}\:{i}\:{shall} \\ $$$${say}\:{that}\:{wben}\:{contact}\:{breaks} \\ $$$$\:\:\:\:\mathrm{sin}\:\boldsymbol{\theta}=\frac{\mathrm{4}}{\mathrm{7}}\left(\frac{\frac{{M}}{{m}}+\frac{\mathrm{1}}{\mathrm{3}}}{\frac{{M}}{{m}}+\frac{\mathrm{2}}{\mathrm{7}}}\right)\mathrm{sin}\:\theta_{\mathrm{0}} \:. \\ $$$$\:\:\:\:\: \\ $$