
Question and Answers Forum

Question Number 27303 by Tinkutara last updated on 04/Jan/18

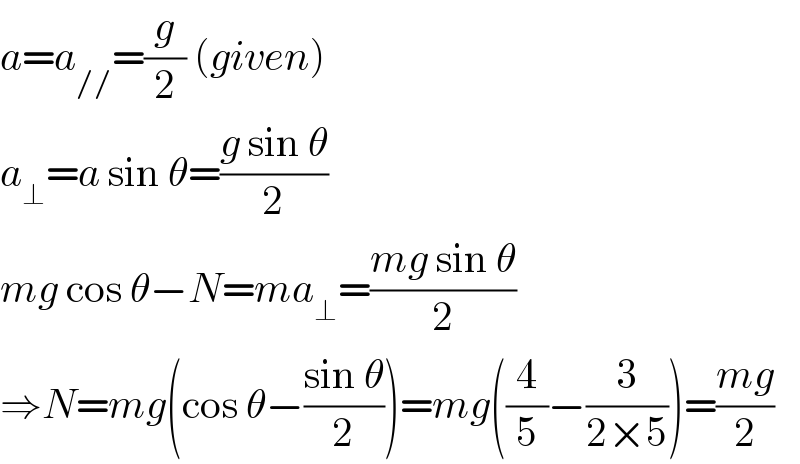
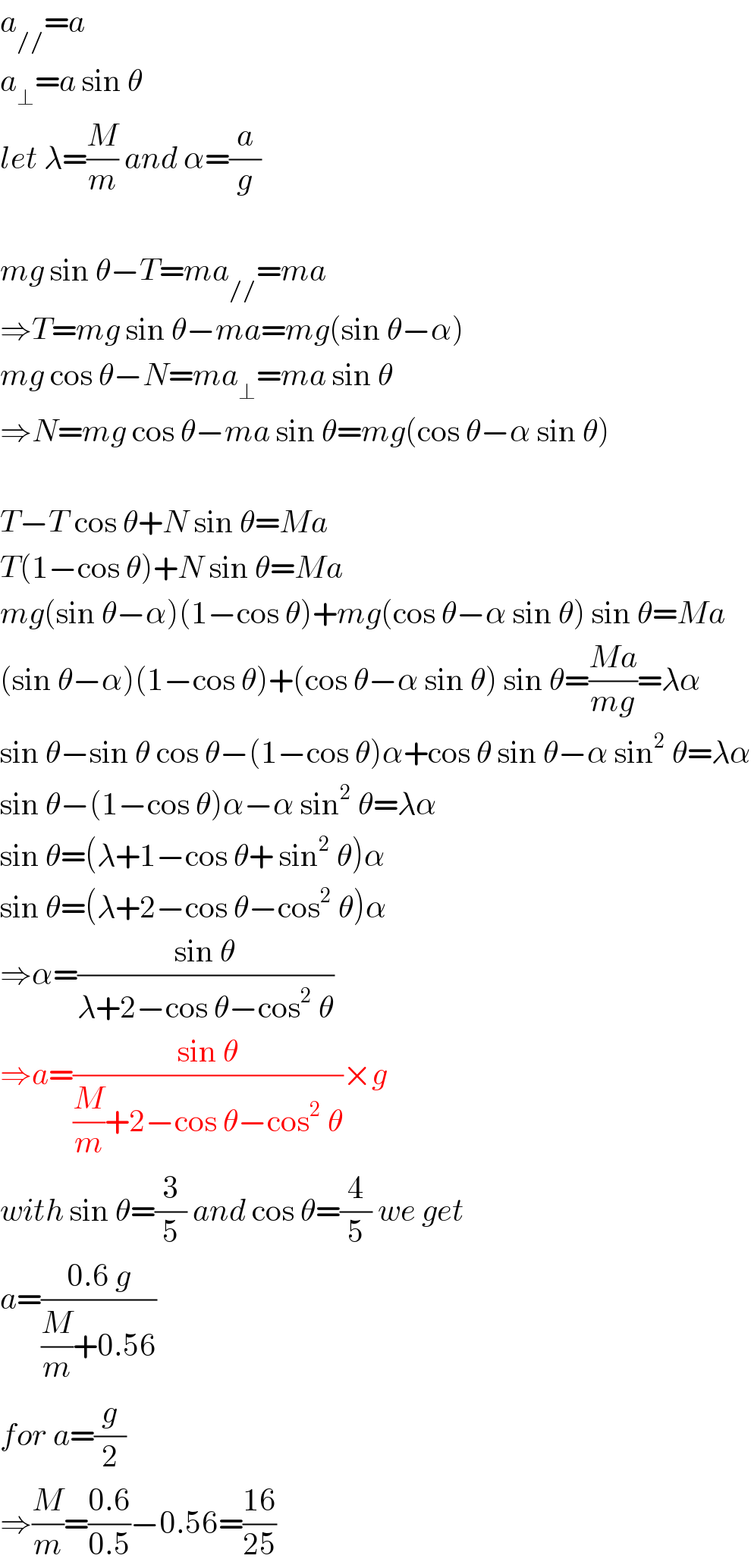
Answered by mrW1 last updated on 05/Jan/18
Commented by mrW1 last updated on 05/Jan/18

Commented by Tinkutara last updated on 05/Jan/18

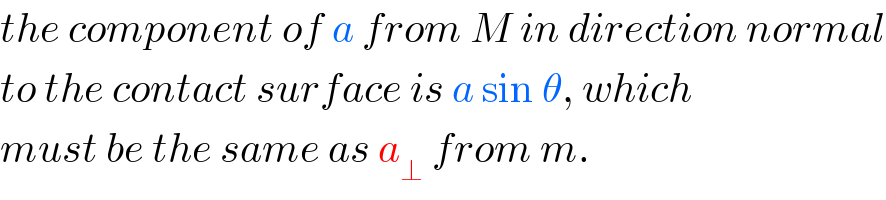
Commented by mrW1 last updated on 05/Jan/18
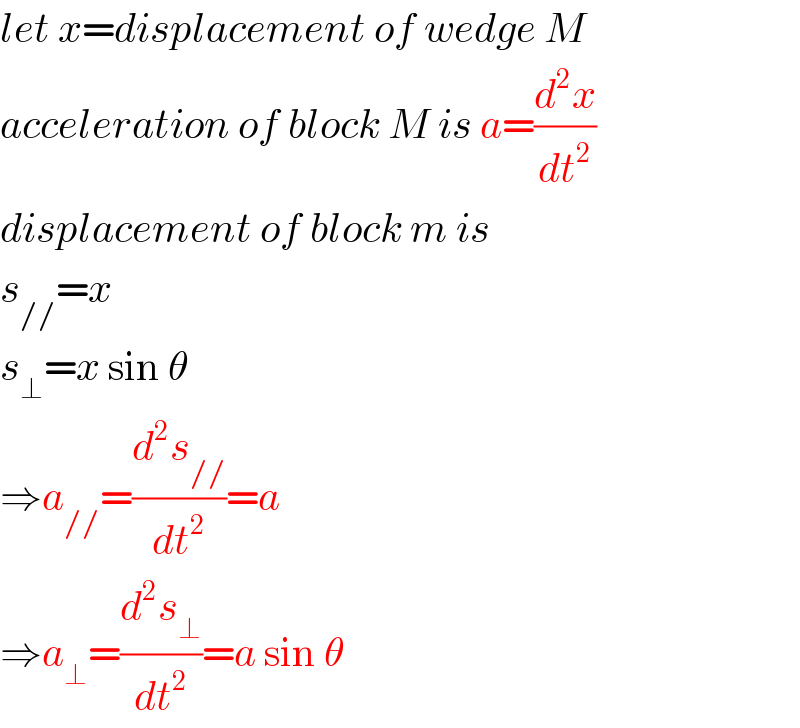
Commented by mrW1 last updated on 05/Jan/18

Commented by mrW1 last updated on 05/Jan/18
Commented by Tinkutara last updated on 05/Jan/18
Then why the relative acceleration of block is g/2 w.r.t wedge?
Commented by mrW1 last updated on 05/Jan/18
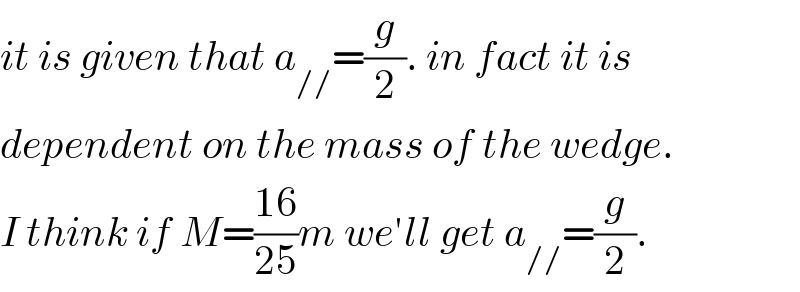
Commented by mrW1 last updated on 05/Jan/18

Commented by Tinkutara last updated on 05/Jan/18
Thank you very much Sir! I got the answer.
Commented by mrW1 last updated on 05/Jan/18
Commented by Tinkutara last updated on 05/Jan/18
I really appreciate this.