
Question and Answers Forum

Question Number 28349 by ajfour last updated on 24/Jan/18

Commented by ajfour last updated on 24/Jan/18
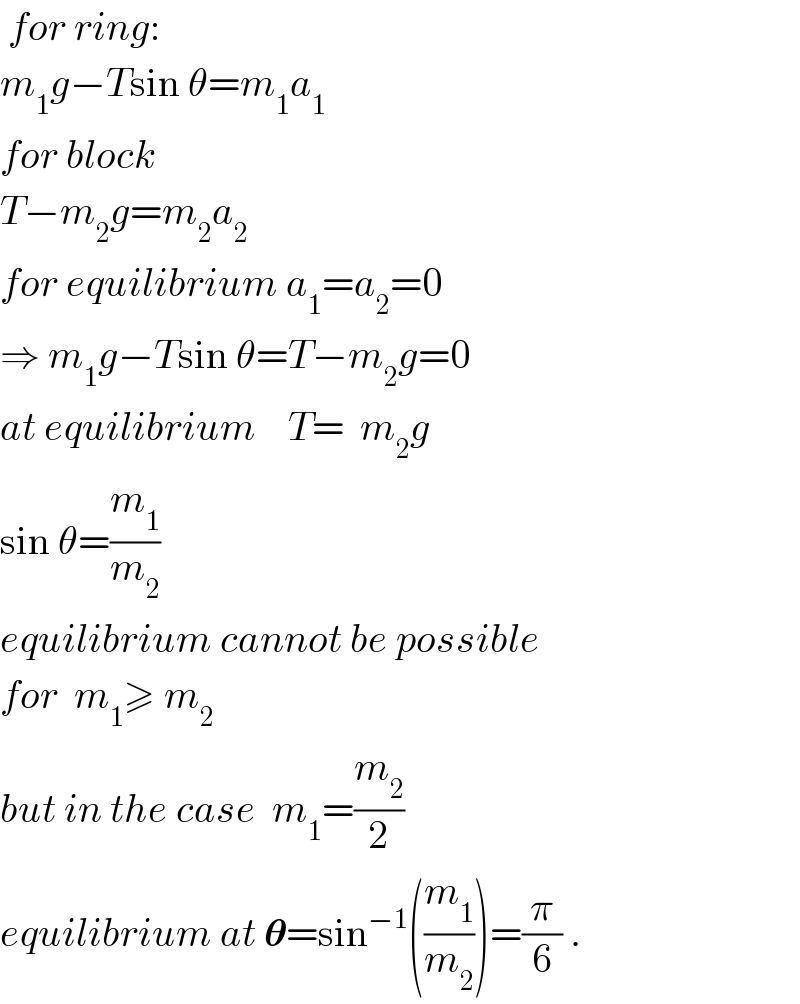
Answered by ajfour last updated on 24/Jan/18

Commented by Tinkutara last updated on 24/Jan/18
This �� is answer in book. Please explain this.
Commented by Tinkutara last updated on 24/Jan/18

Commented by ajfour last updated on 24/Jan/18
Commented by Tinkutara last updated on 25/Jan/18
Thank you very much Sir! I got the answer.