
Question and Answers Forum

Question Number 29093 by ajfour last updated on 04/Feb/18

Commented by ajfour last updated on 04/Feb/18
Answered by mrW2 last updated on 04/Feb/18
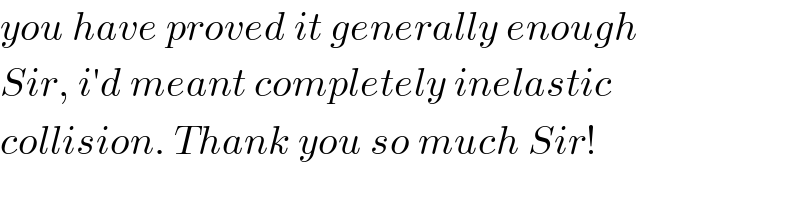
![e=coefficient of restitution v=velocity of hinge after hit (↑) ω=angular speed of rods (↷↶) u_1 =velocity of mass after hit u_0 =velocity of com of rod u_0 =v+((ωl)/2) u_2 =velocity of free end of rod v_2 =v+ωl v_2 −u_1 =eu ⇒v+ωl−u_1 =eu ⇒v_1 =v+ωl−eu Mu=Mu_1 +mu_0 ⇒Mu=M(v+ωl−eu)+m(v+((ωl)/2)) ⇒(M+m)v+(M+(m/2))ωl=M(1+e)u ...(i) Mul=Mu_1 l+((ml^2 )/(12))ω+((ml)/2)v_0 Mul=Mu_1 l+((ml^2 )/(12))ω+((ml)/2)(v+((ωl)/2)) Mul=Mu_1 l+((ml^2 )/3)ω+((mvl)/2) ⇒Mu=M(v+wl−eu)+((ml)/3)ω+((mv)/2) ⇒(M+(m/2))v+(M+(m/3))ωl=M(1+e)u ...(ii) ⇒[(M+m)(M+(m/3))−(M+(m/2))(M+(m/2))]v=[(M+(m/3))−(M+(m/2))]M(1+e)u ⇒v=−((2M(1+e)u)/(4M+m))=−((2(1+e)u)/5) ⇒[(M+m)(M+(m/3))−(M+(m/2))(M+(m/2))]ωl=[(M+m)−(M+(m/2))]M(1+e)u ⇒^ ω=((6M(1+e)u)/((4M+m)l))=((6(1+e)u)/(5l))](Q29103.png)
Commented by ajfour last updated on 04/Feb/18
| ||
Question and Answers Forum | ||
| ||
Question Number 29093 by ajfour last updated on 04/Feb/18 | ||
| ||
Commented by ajfour last updated on 04/Feb/18 | ||
| ||
Answered by mrW2 last updated on 04/Feb/18 | ||
| ||
| ||
Commented by ajfour last updated on 04/Feb/18 | ||
| ||