
Question and Answers Forum

Question Number 29498 by ajfour last updated on 09/Feb/18
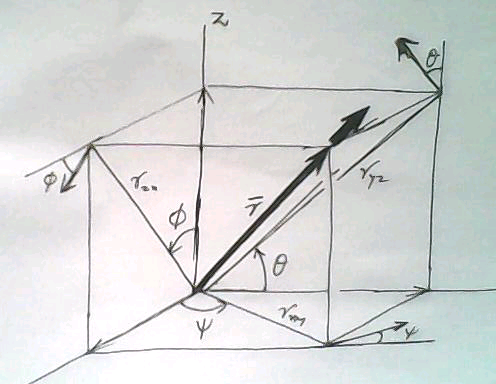
Commented by ajfour last updated on 09/Feb/18
Answered by ajfour last updated on 09/Feb/18
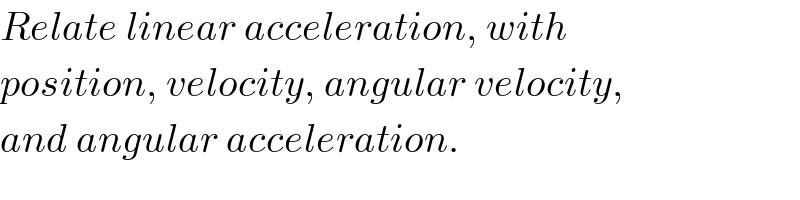
![Acceleration:_(__________________) ds^� = r_(xy) (−sin ψi^� +cos ψj^� )dψ +r_(yz) (−sin θj^� +cos θk^� )dθ +r_(zx) (−sin φk^� +cos φi^� )dφ +dr(((xi^� +yj^� +k^� )/r)) =(zdφ−ydψ)i^� +(xdψ−zdθ)j^� +(ydθ−xdφ)k^� +(dr/r)(xi^� +yj^� +k^� ) ⇒ ds^� = [(i^� ,j^� ,k^� ),(dθ,dφ,dψ),(x,y,z) ]+ (dr/r)(xi^� +yj^� +zk^� ) (ds^� /dt)= v^� =ω^� ×r^� +(1/r)((dr/dt))r^� ⇒ a^� = α^� ×r^� +ω^� ×v^� −(1/r^2 )((dr/dt))^2 r^� +(1/r)((d^2 r/dt^2 ))r^� +(1/r)((dr/dt))v^� a^� =α^� ×r^� +ω^� ×(ω^� ×r^� )+(1/r)((dr/dt))(ω^� ×r^� ) −(1/r^2 )((dr/dt))^2 r^� +(1/r)((d^2 r/dt^2 ))r^� + +(1/r)((dr/dt))(ω^� ×r^� )+(1/r^2 )((dr/dt))^2 r^� a^� = 𝛂^� ×r^� + 𝛚^� ×(𝛚^� ×r^� ) + (1/r)((d^2 r/dt^2 ))r^� +(2/r)((dr/dt))(𝛚^� ×r^� ) −−−−−−−−−−−−−−−](Q29502.png)
| ||
Question and Answers Forum | ||
| ||
Question Number 29498 by ajfour last updated on 09/Feb/18 | ||
| ||
Commented by ajfour last updated on 09/Feb/18 | ||
| ||
Answered by ajfour last updated on 09/Feb/18 | ||
| ||
| ||