
Question and Answers Forum

Question Number 35294 by ajfour last updated on 17/May/18

Commented by ajfour last updated on 17/May/18
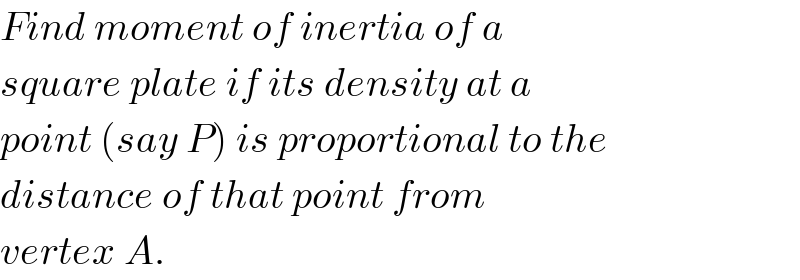
Answered by ajfour last updated on 18/May/18
![lets take the rotational axis the y axis. A the origin. dI=ρx^2 (dy)(dx) let ρ=kr ⇒ I = k ∫_0 ^( a) [∫_0 ^( a) x^2 (√(x^2 +y^2 )) dy]dx or let x=rcos θ , y=rsin θ I=∫_0 ^( π/4) [∫_0 ^( asec θ) kr(r^2 cos^2 θ)(rdr)]dθ +∫_(π/4) ^( π/2) [∫_0 ^( acosec θ) kr(r^2 cos^2 θ)rdr]dθ =((ka^5 )/5)[∫_0 ^( π/4) sec^3 θdθ+∫_(π/4) ^( π/2) cot^2 θcosec^3 θdθ] =((ka^5 )/5)(I_1 +I_2 ) I_1 =∫_0 ^( π/4) sec θsec^2 θdθ =sec θtan θ∣_0 ^(π/4) −∫_0 ^( π/4) (sec^2 θ−1)sec θdθ ⇒ 2I_1 =(√2)+ln ∣sec θ+tan θ∣_0 ^(π/4) ⇒ I_1 =((√2)/2)+(1/2)ln (1+(√2)) I_2 = ∫_(π/4) ^( π/2) cot^2 θcosec^3 θdθ let φ=(π/2)−θ ⇒ dφ=−dθ I_2 =∫_0 ^( π/4) tan^2 θsec^3 θdθ let tan θ=t ⇒ dt=sec^2 θdθ =∫_0 ^( 1) t^2 (√(1+t^2 )) dt =(t^3 /3)(√(1+t^2 )) ∣_0 ^1 −∫_0 ^( 1) (t^3 /3)×(t/(√(1+t^2 )))dt 3I_2 =(√2)−∫_0 ^( 1) ((t^4 −1)/(√(1+t^2 )))dt−∫_0 ^( 1) (dt/(√(1+t^2 ))) 3I_2 = (√2)−∫_0 ^( 1) (t^2 −1)(√(1+t^2 )) dt−∫(dt/(√(1+t^2 ))) 4I_2 = (√2)+∫_0 ^( 1) (√(1+t^2 ))−∫_0 ^( 1) (dt/(√(1+t^2 ))) = (√2)+((t/2)(√(1+t^2 )))∣_0 ^1 +(1/2)ln ∣t+(√(1+t^2 ))∣_0 ^1 −ln ∣t+(√(1+t^2 ))∣_0 ^1 ⇒ I_2 =((√2)/4)+((√2)/8)−(1/8)ln (1+(√2)) As I=((ka^5 )/5)(I_1 +I_2 ) I=((ka^5 )/5)[((√2)/2)+(1/2)ln (1+(√2))+ +((√2)/4)+((√2)/8)−(1/8)ln (1+(√2))] ⇒ I = ((ka^5 )/(40))[7(√2)+3ln (1+(√2)] .](Q35301.png)
| ||
Question and Answers Forum | ||
| ||
Question Number 35294 by ajfour last updated on 17/May/18 | ||
| ||
Commented by ajfour last updated on 17/May/18 | ||
| ||
Answered by ajfour last updated on 18/May/18 | ||
| ||
| ||