Question and Answers Forum

Question Number 43187 by ajfour last updated on 08/Sep/18

Commented by ajfour last updated on 08/Sep/18
Answered by ajfour last updated on 08/Sep/18
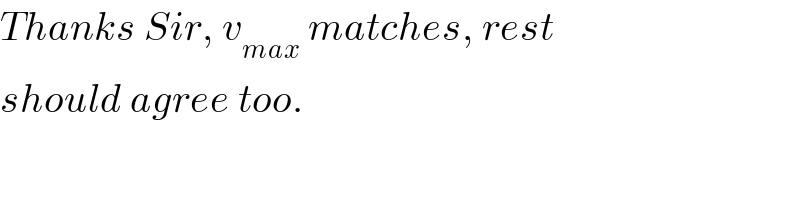
![Case 1: (fuel over at t=t_1 , toy stops at t=t_2 ) let initial mass of fuel be m_0 M+m_0 = M_0 (M+m)(dv/dt)= −μN+q(ucos θ) N=(M+m)g+qusin θ ⇒ (dv/dt)= −μg+((qu(cos θ−μsin θ))/(M+m_0 −qt)) let λ=cos θ−μsin θ ⇒ ∫_0 ^( v) dv = −μgt+λuln ((M_0 /(M_0 −qt))) displacement s for this accelerating period is s=−((𝛍gt^2 )/2)+𝛌u∫_0 ^( t) ln ((M_0 /(M_0 −qt)))dt ∫_0 ^( t) ln ((M_0 /(M_0 −qt)))dt=tln ((M_0 /(M_0 −qt)))∣_0 ^t −∫_0 ^( t) t((q/(M_0 −qt)))dt =tln ((M_0 /(M_0 −qt)))+t+(M_0 /q)ln (((M_0 −qt)/M_0 )) ⇒ s_1 =λu[(m_0 /q)−(((M_0 −m_0 ))/q)ln ((M_0 /M))] −((μgm_0 ^2 )/(2q^2 )) Now t_1 = (m_0 /q) v_(max) = −((𝛍gm_0 )/q)+𝛌uln (((M+m_0 )/M)) hereafter s_2 =(v_(max) ^2 /(2𝛍g)) Total distance traveled is = s_1 +s_2 .](Q43247.png)
Commented by MrW3 last updated on 08/Sep/18

Answered by MrW3 last updated on 08/Sep/18
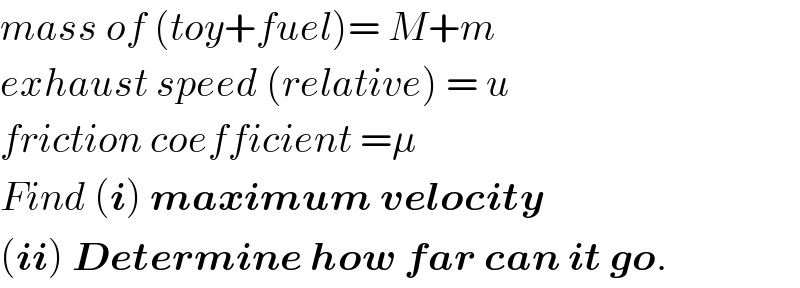
![let m_0 =mass of fuel at t=0 let′s say at t=t_1 tank is empty. and it stops at t=t_2 0≤t≤t_1 : motion with variable mass M+m t_1 ≤t≤t_2 : motion with constant mass M in following it is assumed that the friction is so small as well as u and q are so large that the toy starts to move at t=0, see condition (I). (M+m)g−N−u sin θ ((d(M+m))/dt)=0 ⇒N=(M+m)g+uq sin θ −Nμ−u cos θ ((d(M+m))/dt)=(M+m)(dv/dt) ⇒−(M+m)μg+(cos θ−μ sin θ)uq=(M+m)(dv/dt) ⇒(M+m)(μg+(dv/dt))=uq(cos θ−μ sin θ) m=m_0 −qt ⇒(M+m_0 −qt)(μg+(dv/dt))=uq(cos θ−μ sin θ) ⇒(dv/dt)=((uq(cos θ−μ sin θ))/(M+m_0 −qt))−μg let M_0 =M+m_0 , λ=cos θ−μ sin θ ⇒a=(dv/dt)=((uqλ)/(M_0 −qt))−μg so that the toy starts to move at t=0, ((uqλ)/M_0 )−μg≥0 ⇒uq≥((μgM_0 )/λ)=((μg(M+m_0 ))/(cos θ−μ sin θ)) ...(I) ∫_0 ^v dv=∫_0 ^t (((uqλ)/(M_0 −qt))−μg)dt ⇒v=[−uλ ln (M_0 −qt)−μgt]_0 ^t ⇒v(t)=uλ ln (M_0 /(M_0 −qt))−μgt this is valid for t≤t_1 =(m_0 /q)=moment when tank is empty v_1 =v(t_1 )=uλ ln (M_0 /M)−((μgm_0 )/q) for t>t_1 : −μMg=M(dv/dt) ⇒(dv/dt)=−μg ∫_v_1 ^v dv=−∫_t_1 ^t μgdt v(t)−v_1 =−μg(t−t_1 ) ⇒v(t)=v_1 −μg(t−t_1 ) at t=t_2 : v=0 uλ ln (M_0 /M)−((μgm_0 )/q)−μg(t_2 −(m_0 /q))=0 t_2 =((uλ)/(μg)) ln (1+(m_0 /M)) since a≥0 for t≤t_1 , the max. v is reached at t_1 : v_(max) =v_1 =uλ ln(1+(m_0 /M))−((μgm_0 )/q) (ds/dt)=uλ ln (M_0 /(M_0 −qt))−μgt ∫_0 ^s ds=∫_0 ^t (uλ ln (M_0 /(M_0 −qt))−μgt)dt s(t)=((uλ)/q)[M_0 ln (M_0 −qt)+qtln ((M_0 /(M_0 −qt)))+qt]_0 ^t −((μgt^2 )/2) s(t)=((uλ)/q)[qt−(M_0 −qt)ln ((M_0 /(M_0 −qt)))]−((μgt^2 )/2) s(t)=uλ[t−((M_0 /q)−t)ln ((M_0 /(M_0 −qt)))]−((μgt^2 )/2) at t=t_1 : s_1 =((uλ)/q)[m_0 −Mln ((M_0 /M))]−((μgm_0 ^2 )/(2q^2 )) distance covered in t_1 ≤t≤t_2 : Δs_2 =(v_1 ^2 /(2μg))=(1/(2μg))[uλ ln (M_0 /M)−((μgm_0 )/q)]^2 total distance: s_(max) =s_2 =s_1 +Δs_2 ⇒s_(max) =((uλ)/q)[m_0 −M ln (1+(m_0 /M))]−((μgm_0 ^2 )/(2q^2 ))+(1/(2μg))[uλ ln(1+ (m_0 /M))−((μgm_0 )/q)]^2](Q43203.png)
Commented by ajfour last updated on 08/Sep/18