
Question and Answers Forum

Question Number 44573 by Raj Singh last updated on 01/Oct/18
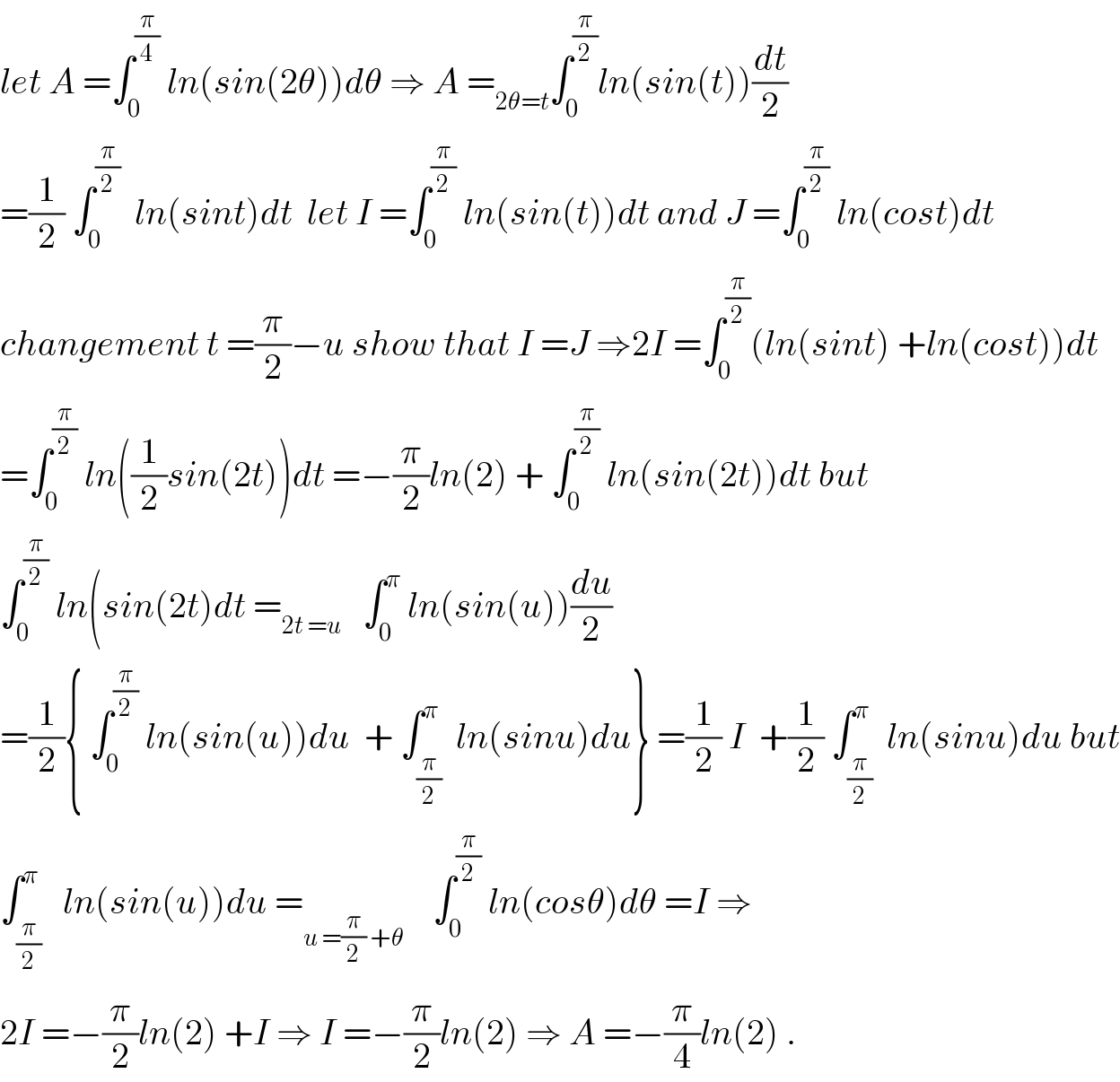
Commented by maxmathsup by imad last updated on 01/Oct/18
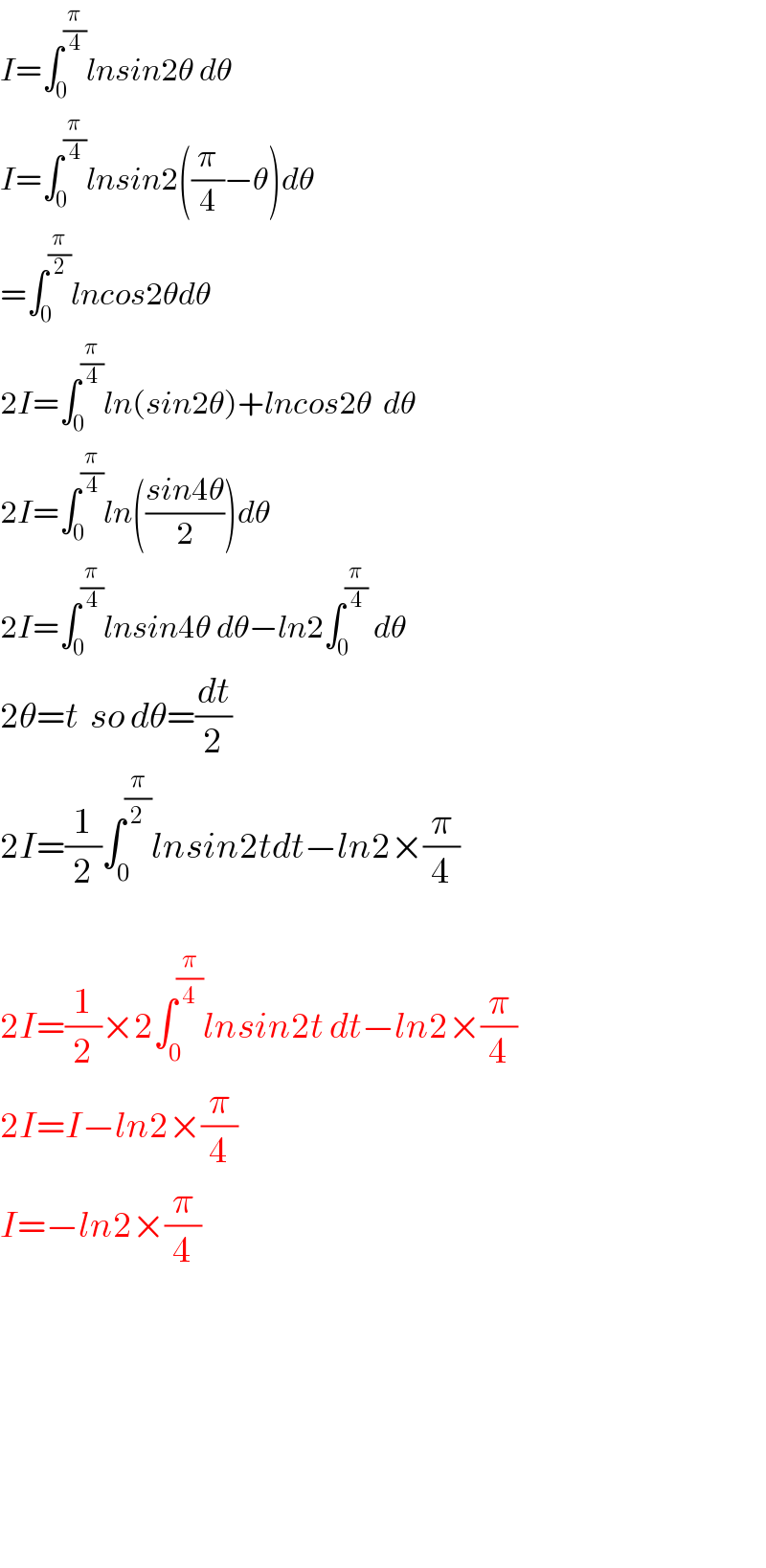
Answered by tanmay.chaudhury50@gmail.com last updated on 01/Oct/18
| ||
Question and Answers Forum | ||
| ||
Question Number 44573 by Raj Singh last updated on 01/Oct/18 | ||
| ||
Commented by maxmathsup by imad last updated on 01/Oct/18 | ||
| ||
Answered by tanmay.chaudhury50@gmail.com last updated on 01/Oct/18 | ||
| ||
| ||