Question and Answers Forum

Question Number 45205 by Necxx last updated on 10/Oct/18

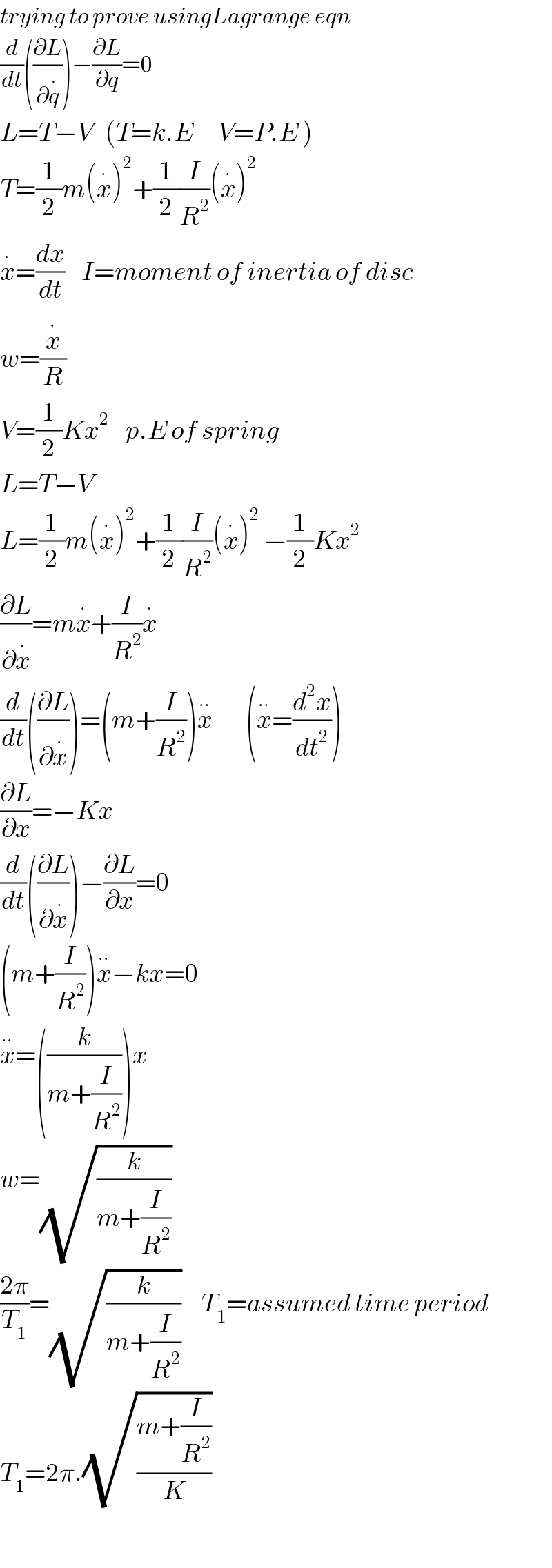
Answered by tanmay.chaudhury50@gmail.com last updated on 11/Oct/18
Commented by Necxx last updated on 12/Oct/18
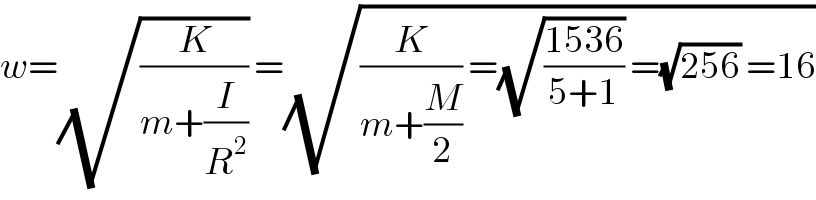
Answered by tanmay.chaudhury50@gmail.com last updated on 11/Oct/18