Question and Answers Forum

Question Number 50101 by ajfour last updated on 13/Dec/18

Commented by ajfour last updated on 14/Dec/18
Commented by tanmay.chaudhury50@gmail.com last updated on 14/Dec/18
Commented by ajfour last updated on 14/Dec/18
Commented by mr W last updated on 14/Dec/18
Answered by mr W last updated on 14/Dec/18
=(v/h) (v_y /h)−(((δ^2 −1+2γ)/(2δ^2 )))((λ/(√(1+λ^2 −2γ)))−1)(v/h)=(v/h) v_y ={1+(((δ^2 −1+2γ)/(2δ^2 )))((λ/(√(1+λ^2 −2γ)))−1)}v at t=t_1 : δ=δ_1 , x=R, λ=(R/h)=γ v_y ={1+((((√(γ^2 +1−2γ))−γ)^2 −1+2γ)/(2((√(γ^2 +1−2γ))−γ)^2 ))((γ/(√(1+γ^2 −2γ)))−1)}v ⇒v_y ={1+((γ(1−2γ))/((1−γ)((√(γ^2 +1−2γ))−γ)))}v (1/2)Mv^2 +(1/2)(MR^2 )ω^2 +(1/2)Mv_y ^2 =Mg(h−a−R) 2v^2 +v_y ^2 =2gh(1−α−γ) [2+{1+((γ(1−2γ))/((1−γ)((√(γ^2 +1−2γ))−γ)))}^2 ]v^2 =2gh(1−α−γ) ⇒v=(√((2gh(1−α−γ))/(2+{1+((γ(1−2γ))/((1−γ)((√(γ^2 +1−2γ))−γ)))}^2 )))](Q50148.png)
Commented by ajfour last updated on 14/Dec/18
Commented by mr W last updated on 14/Dec/18

Commented by mr W last updated on 14/Dec/18
Commented by ajfour last updated on 16/Dec/18
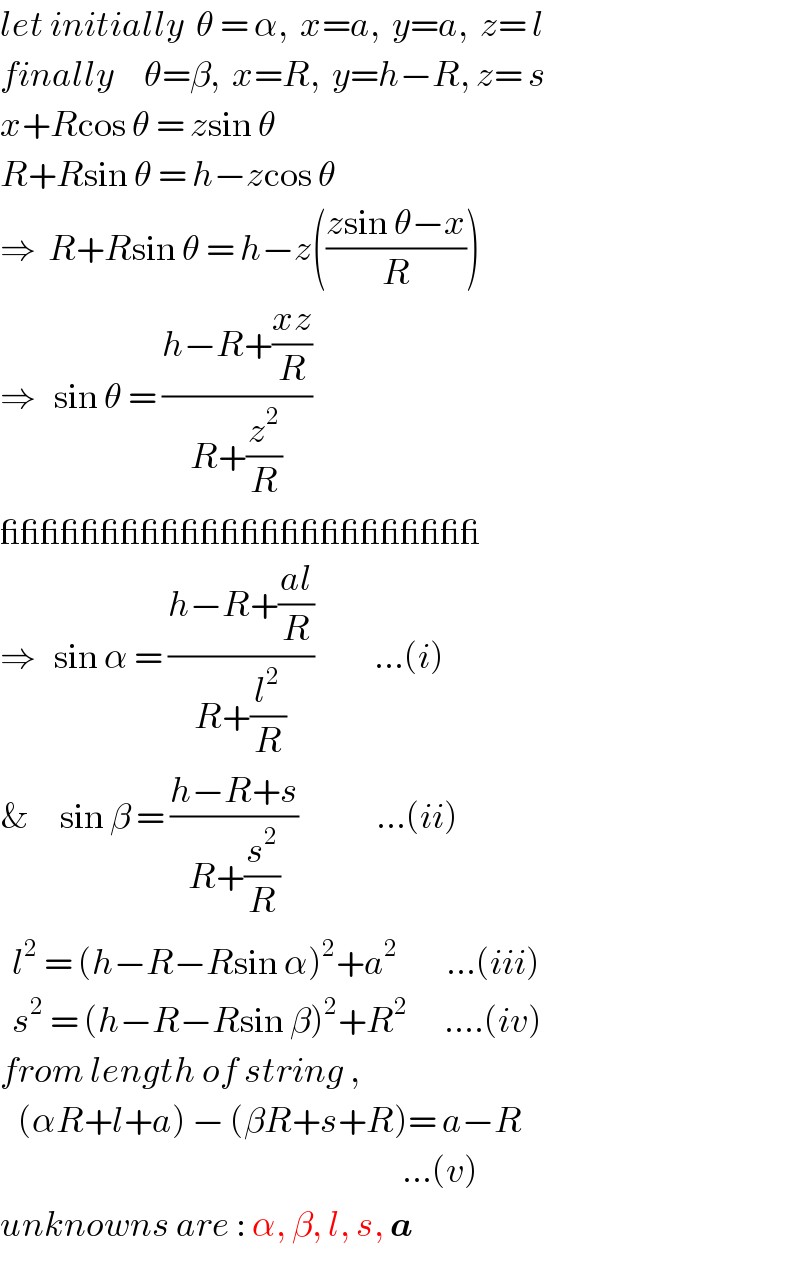
Answered by ajfour last updated on 14/Dec/18

Commented by ajfour last updated on 14/Dec/18