Question and Answers Forum

Question Number 58698 by arnabmaiti550@gmail.com last updated on 28/Apr/19

Commented by tanmay last updated on 28/Apr/19

Commented by arnabmaiti550@gmail.com last updated on 28/Apr/19

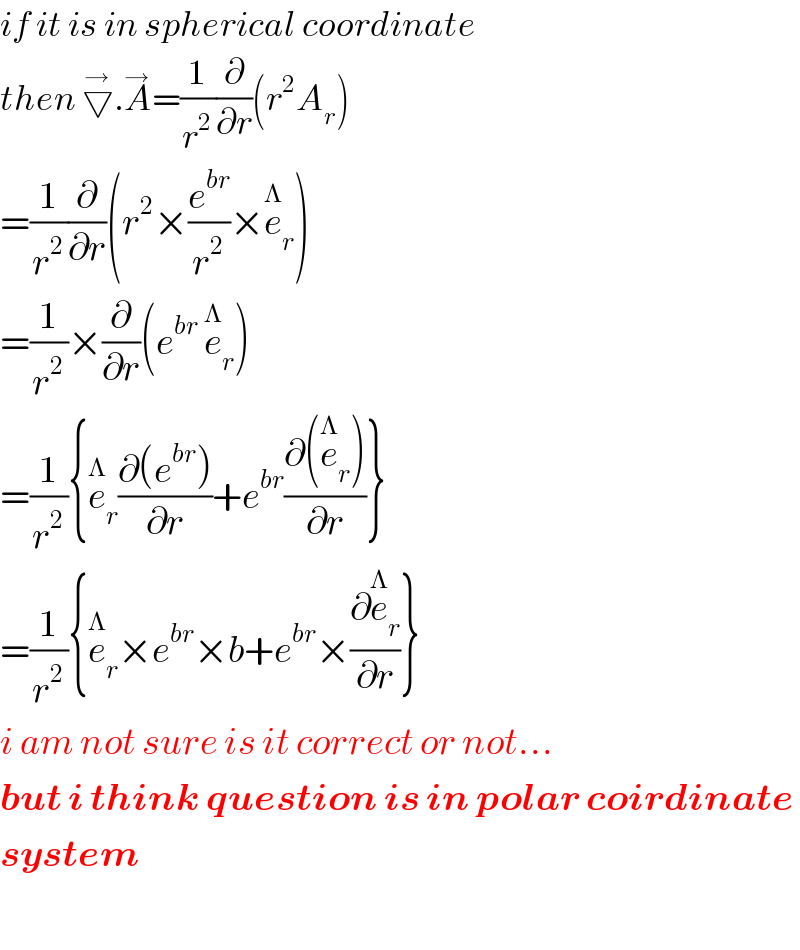
Commented by tanmay last updated on 28/Apr/19
Commented by tanmay last updated on 28/Apr/19

Answered by tanmay last updated on 28/Apr/19