
Question and Answers Forum

Question Number 6820 by Tawakalitu. last updated on 29/Jul/16
Commented by Yozzii last updated on 29/Jul/16
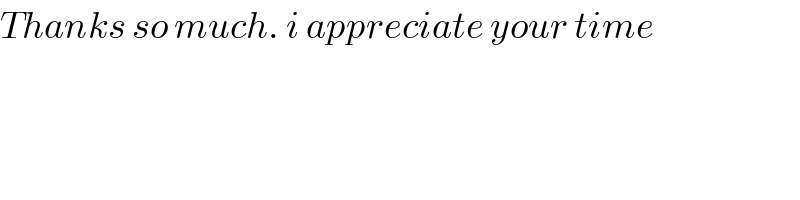
![p(t)= (((αtant)),(0),((αsect)) ) α=constant>0, t∈[0,(π/2)] ⇒(dp/dt)(t)=v_p (t)= (((αsec^2 t)),(0),((αsect×tant)) ) ⇒(d^2 p/dt^2 )(t)=a_p (t)= (((2αsec^2 t×tant)),(0),((α(sect×tant×tant+sec^3 t))) ) a_p (t)= (((2αtantsec^2 t)),(0),((α(tan^2 t+sec^2 t)sect)) ) v_p (0)= ((α),(0),(0) ) , a_p (0)= ((0),(0),(α) ) ∴ v_p (0)•a_p (0)=α×0+0×0+0×α=0 Since v_p (0)•a_p (0)=0, the velocity and acceleration are perpendicular to each other at t=0. a(t)= ((0),(α),(0) ) Direction vector of line AP is parallel to b(t)=p(t)−a(t)= (((αtant)),((−α)),((αsect)) )=α (((tant)),((−1)),((sect)) ) So, the vector equation of the line AP is r= ((0),(α),(0) ) +μ (((tant)),((−1)),((sect)) ) (μ∈R). For Q dividing AP in the ratio (cost):(1−cost), μ=cost (OQ=OA+cost(AP)) ∴ q(t)= ((0),(α),(0) ) +cost (((tant)),((−1)),((sect)) ) q(t)= (((sint)),((α−cost)),(1) ) v_q (t)=((dq(t))/dt)= (((cost)),((sint)),(0) ) a_q (t)=((dv_q (t))/dt)= (((−sint)),((cost)),(0) ) ⇒∣a_q (t)∣=(√((−sint)^2 +(cost)^2 +0^2 ))=1 Since ∣a_q (t)∣=1 for all t∈[0,(π/2)], the acceleration of the point Q is constant in magnitude. Since the acceleration of Q has no component parallel to the unit vector k, but variable components parallel to i and j, a_q (t) acts entirely in the plane containing both the vectors i and j. Observe that v_q (t)•a_q (t)=0 ⇒velocity and accleration of Q are normal to each other.](Q6822.png)
Commented by Tawakalitu. last updated on 30/Jul/16
| ||
Question and Answers Forum | ||
| ||
Question Number 6820 by Tawakalitu. last updated on 29/Jul/16 | ||
| ||
Commented by Yozzii last updated on 29/Jul/16 | ||
| ||
Commented by Tawakalitu. last updated on 30/Jul/16 | ||
| ||