
Question and Answers Forum

Question Number 68451 by mr W last updated on 10/Sep/19

Commented by mr W last updated on 11/Sep/19
Commented by ajfour last updated on 11/Sep/19
Commented by mr W last updated on 10/Sep/19
Commented by ajfour last updated on 11/Sep/19

Commented by ajfour last updated on 11/Sep/19
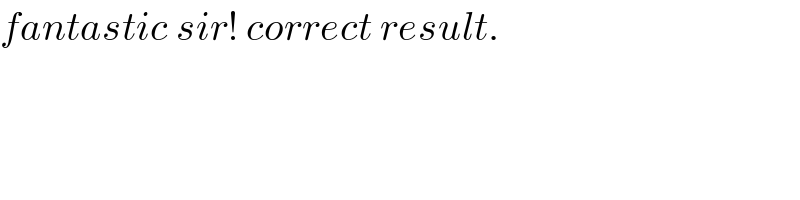
![Lets try and find time it takes to slip down. N+mAcos θ−mgsin θ=((mv_r ^2 )/R) mAsin θ+mgcos θ=((mv_r dv_r )/(Rdθ)) Ncos θ=MA ⇒ if we let M=μm μAsec θ+Acos θ−gsin θ=(v_r ^2 /R) ..(i) Asin θ+gcos θ=((v_r dv_r )/(Rdθ)) ⇒ A=(((v_r dv_r )/(Rdθ))−gcos θ)cosec θ ...(ii) ⇒ (μsec θ+cos θ)(((v_r dv_r )/(Rdθ))−gcos θ)cosec θ −gsin θ=(v_r ^2 /R) let v_r ^2 /R=2s ⇒ v_r dv_r /R=ds Now (μsec θ+cos θ)(cosec θ)(ds/dθ)−2s = gsin θ+gcos θcosec θ(μsec θ+cos θ) or (ds/dθ)−((2s(sin θ))/((μsec θ+cos θ))) =g(((sin^2 θ)/(μsec θ+cos θ))+cos θ) ⇒ (ds/(cos θdθ))−((2s(sin θ))/((μ+cos^2 θ))) =g(1+((sin^2 θ)/(μ+cos^2 θ))) let sin θ=u ⇒ cos θdθ=du ⇒ (ds/du)−((2su)/(μ+1−u^2 ))=((g(μ+1))/(μ+1−u^2 )) let μ+1=λ ⇒ (ds/du)+((2su)/(u^2 −λ))=((λg)/(λ−u^2 )) ⇒ (u^2 −λ)(ds/du)+2su=−λg ⇒ ∫_0 ^( s(u^2 −λ)) d[s(u^2 −λ)]=−λg∫_0 ^( u) du ⇒ s(u^2 −λ)=−λgu ⇒ [ (v_r ^2 /(2R))(sin^2 θ−λ)=−λgsin θ] but if we continue with same variable u=sin θ, then ⇒ v_r =((d(Rdθ))/dt)=(√(2sR)) = (√(2R(((λgu)/(λ−u^2 ))))) ∫_0 ^( T) dt =∫_0 ^( 1) ((Rdu)/(√(1−u^2 )))(√((λ−u^2 )/(2λgRu))) T=(√(R/(2λg)))∫_0 ^( 1) (√((λ−u^2 )/(u(1−u^2 )))) du If wedge is far too heavier, then it is as good as fixed; μ=(M/m)→∞ T=(√(R/(2g)))∫_0 ^( 1) (du/(√(u(1−u^2 )))) =t_0 ∫_0 ^( π/2) ((cos θdθ)/(√(sin θcos^2 θ))) =t_0 ∫_0 ^( π/2) (dθ/(√(sin θ))) let sin θ=t^2 ⇒ 2tdt=cos θdθ ⇒ dθ=((2tdt)/(√(1−t^2 ))) T=t_0 ∫_0 ^( 1) ((2tdt)/(t(√(1−t^2 )))) = 2t_0 ∫_0 ^( 1) (dt/(√(1−t^2 ))) =2t_0 ((π/2)) =πt_0 T=π(√(R/(2g))) ! If there is a very light wedge (just to check) μ=(M/m) →0 ⇒ λ→1 T=(√(R/(2g)))∫_0 ^( 1) (du/(√u)) T= (√((2R)/g)) (fabulous!) but i think otherwise solving the integration is beyond my understanding..](Q68480.png)
Commented by mr W last updated on 11/Sep/19
Commented by mr W last updated on 11/Sep/19
Answered by ajfour last updated on 10/Sep/19
![mgR=(1/2)mv^2 +(1/2)MV^( 2) mv=MV 2mgR=[m+M((m/M))^2 ]v^2 v=(√((2MgR)/(M+m))) , V=(√((2mgR)/(M+m))) .](Q68459.png)
Commented by mr W last updated on 11/Sep/19
