
Question and Answers Forum

Question Number 72036 by mr W last updated on 23/Oct/19
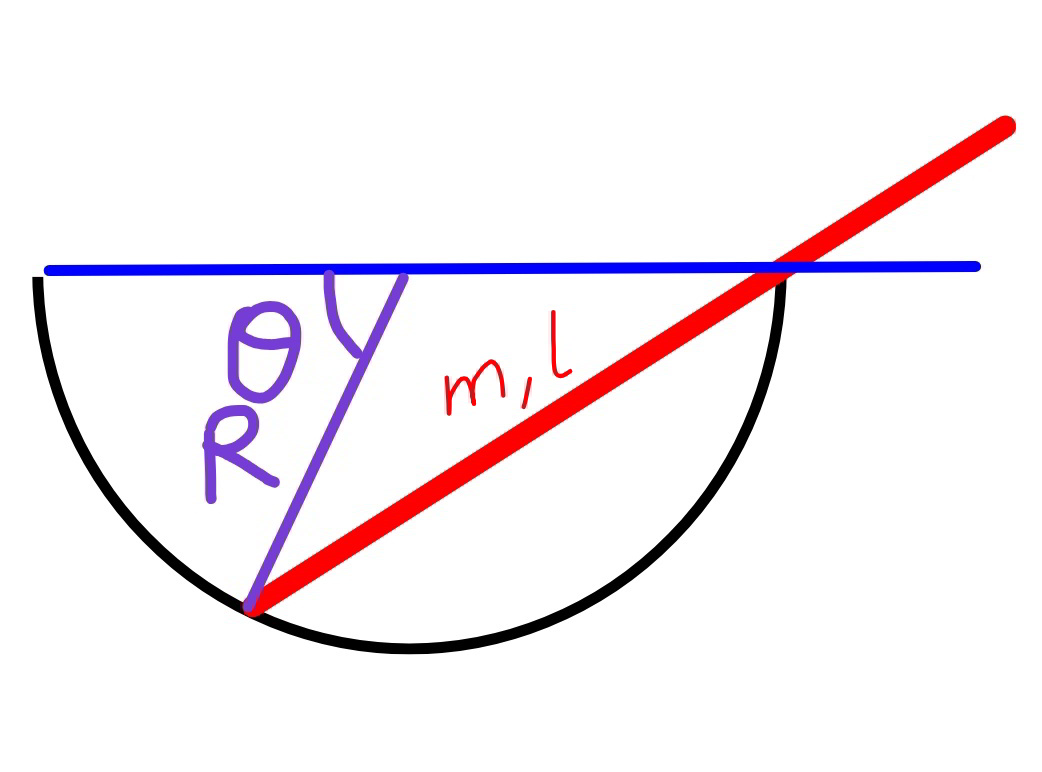
Commented by mr W last updated on 23/Oct/19
Commented by ajfour last updated on 23/Oct/19
Commented by mr W last updated on 23/Oct/19

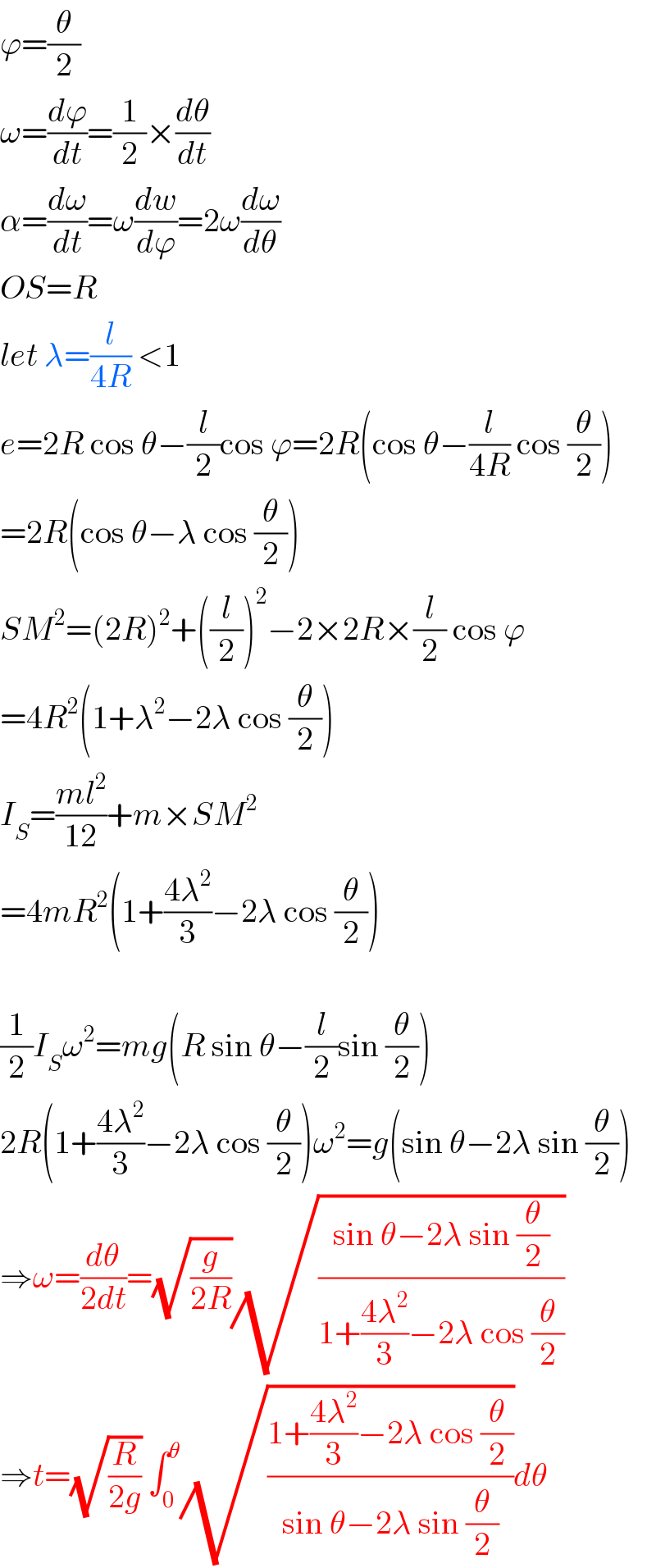
Answered by mr W last updated on 24/Oct/19
Commented by mr W last updated on 24/Oct/19
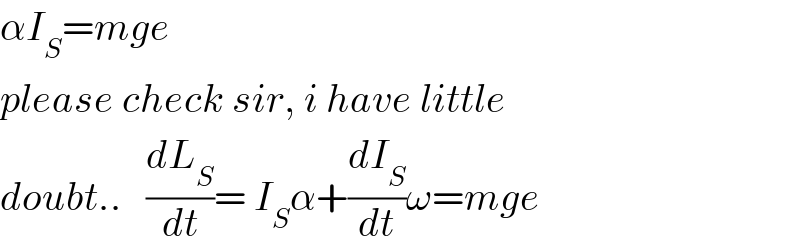
Commented by ajfour last updated on 24/Oct/19
Commented by mr W last updated on 24/Oct/19
Commented by ajfour last updated on 24/Oct/19
Commented by mr W last updated on 24/Oct/19

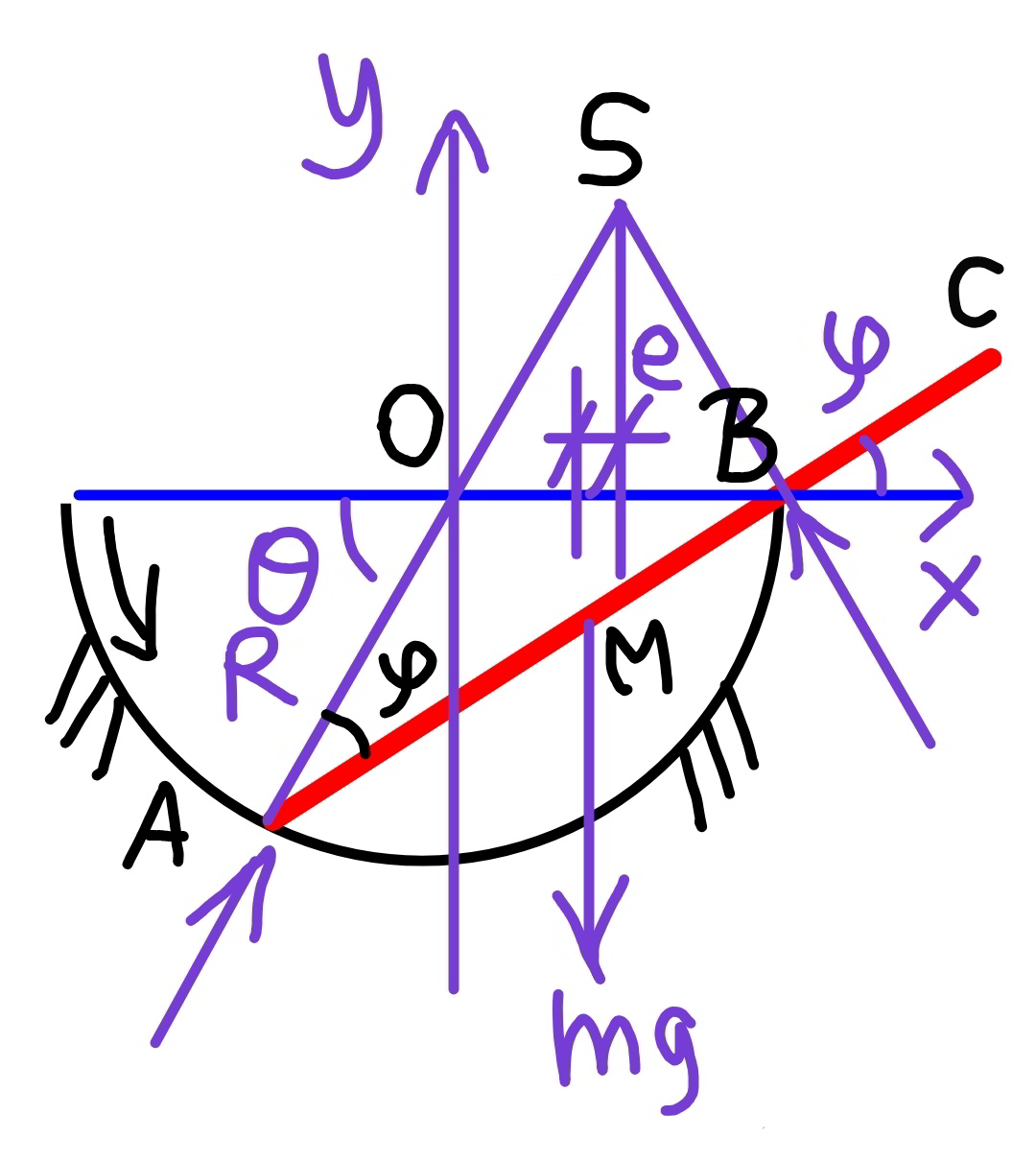
Answered by ajfour last updated on 23/Oct/19
Commented by ajfour last updated on 24/Oct/19
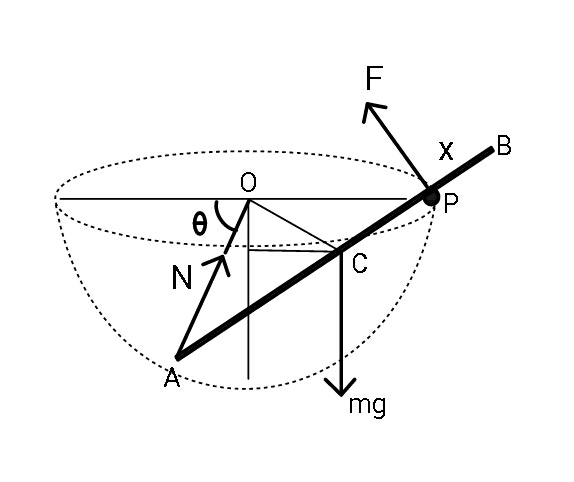
 ..(iii) x=l−2Rcos φ ⇒ −(dx/dt)=−ωRsin φ (d^2 x/dt^2 )=ω^2 Rcos φ Now from (ii) Ncos φ−mgsin φ=m(d^2 x/dt^2 )+mω^2 ((l/2)−x) ⇒ N=mgtan φ+mω^2 R+mω^2 ((l/2)−x)sec φ using this and (i), (iii) in (dL/dt)=τ_P ⇒ 2ωm((l/2)−x)(−(dx/dt))+[((ml^2 )/(12))+m((l/2)−x)^2 ](dω/dt) =−(Nsin φ)(l−x)+(mgcos φ)((l/2)−x) ⇒ 2ω(2Rcos φ−(l/2))(−ωRsin φ) +[(l^2 /(12))+(2Rcos φ)^2 ]((ωdω)/dφ) = −{gtan φ+ω^2 R+ω^2 (2Rcos φ−(l/2))sec φ}sin φ(2Rcos φ) +gcos φ(2Rcos φ−(l/2)) ⇒ ((l^2 /(12))+4R^2 cos^2 φ)((ωdω)/dφ) +2ω^2 R^2 sin φcos φ = 2gR(cos^2 φ−sin^2 φ)−((glcos φ)/2) let ω^2 =z ⇒ (dz/dφ)+(((4R^2 sin φcos φ)/((l^2 /(12))+4R^2 cos^2 φ)))z = ((4gR(cos^2 φ−sin^2 φ)−glcos φ)/(l^2 /12+4R^2 cos^2 φ)) e^(∫Pdx) =e^(∫((4R^2 sin φcos φdφ)/(l^2 /12+4R^2 cos^2 φ))) =−(1/(√(l^2 /12+4R^2 cos^2 φ))) ⇒ −(z/(√(l^2 /12+4R^2 cos^2 φ))) =∫(([4gR(cos^2 φ−sin^2 φ)−glcos φ]dφ)/((l^2 /12+4R^2 cos^2 φ)^(3/2) )) .....](Q72096.png)