Question and Answers Forum

Question Number 80057 by ajfour last updated on 30/Jan/20
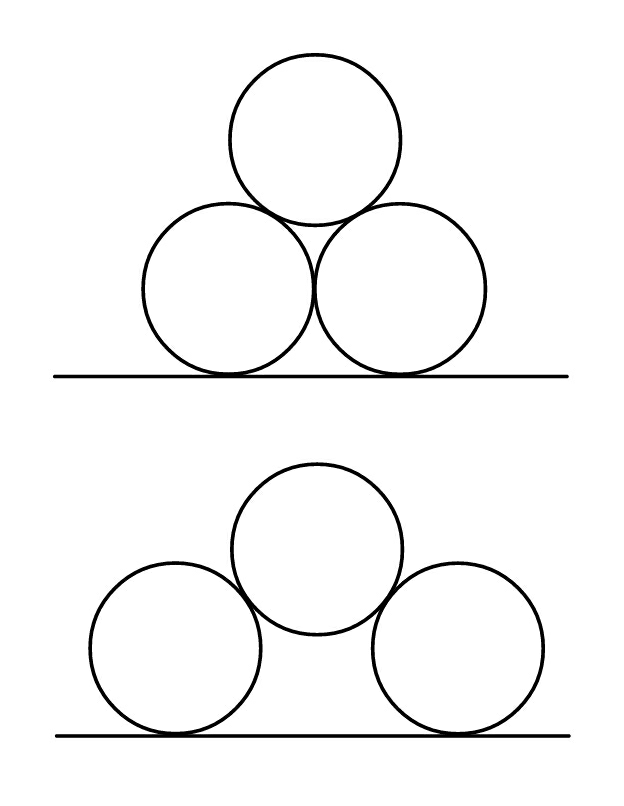
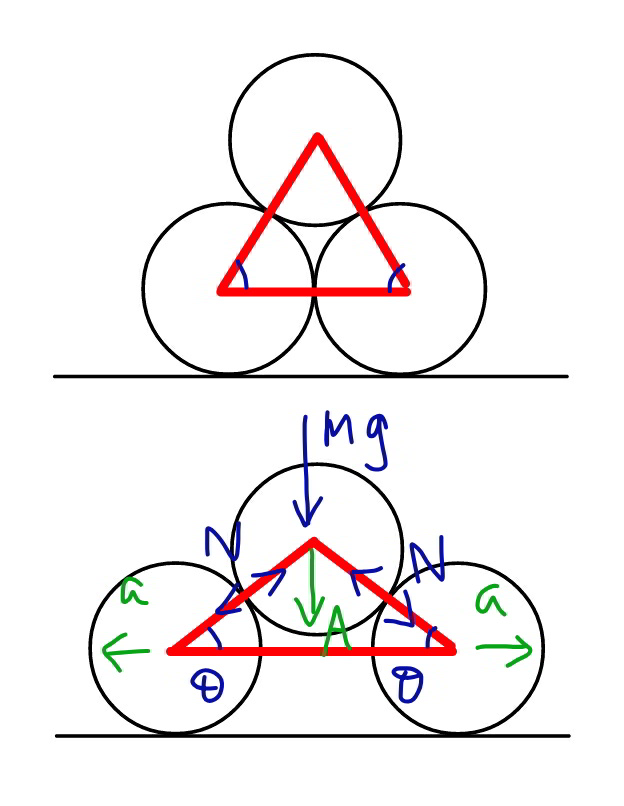
Commented by ajfour last updated on 30/Jan/20
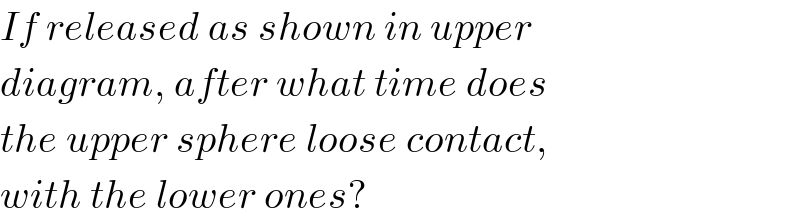
Commented by ajfour last updated on 30/Jan/20
Answered by mr W last updated on 30/Jan/20
Commented by mr W last updated on 04/Feb/20

Commented by mr W last updated on 31/Jan/20
Commented by ajfour last updated on 31/Jan/20